Appendix D Moving a Robot or Motion Device With the MCP
Adept MV Controller User’s Guide, Rev. B 257
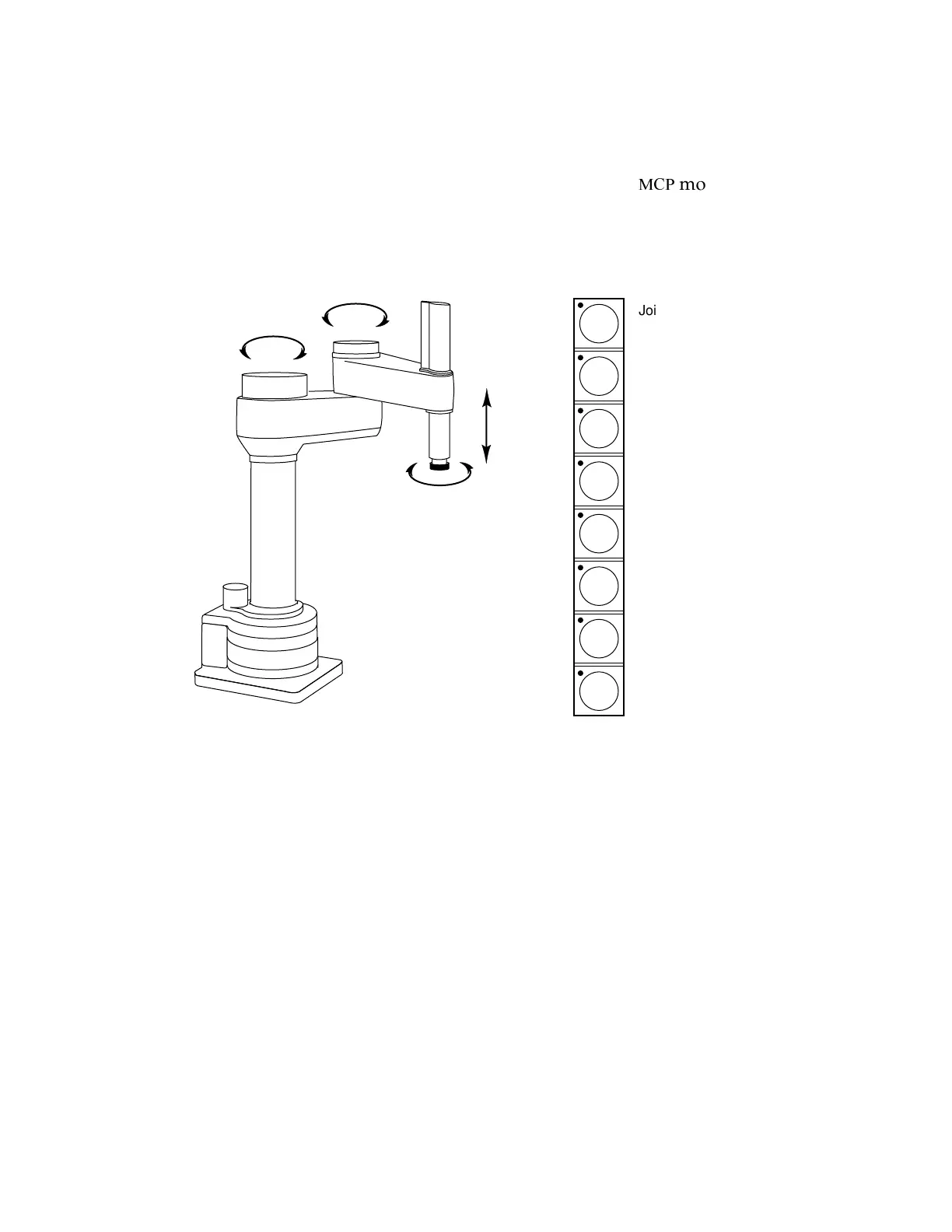
Different robots or motion devices will have the different joint numbers assigned
to their joints. When you first move an unfamiliar robot using joint state, set the
monitor speed to 10 or lower, put the robot in a safe area, and carefully move the
robot using the different joint numbers to verify how the
.%
moves the robot.
See the documentation for the motion devices you are using for details on their
joint assignments.
Figure D-16. JOINT State (Four-Axis SCARA)
Figure D-17 shows the joint assignments for a typical six-axis robot (as always,
the first time you move a robot, carefully verify the joint assignments).
T
STEP
1
RZ
6
RY
5
RX
4
Z
3
Y
2
X
1
Joint 1
Joint 2
Joint 3
Joint 4
Joint 1
Joint 2
Joint 3
Joint 4
Joint 1
Joint 2
Joint 3
Joint 4
Joint 4
Joint 3
Joint 2
Joint 1
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com