Appendix D Moving a Robot or Motion Device With the MCP
258 Adept MV Controller User’s Guide, Rev. B
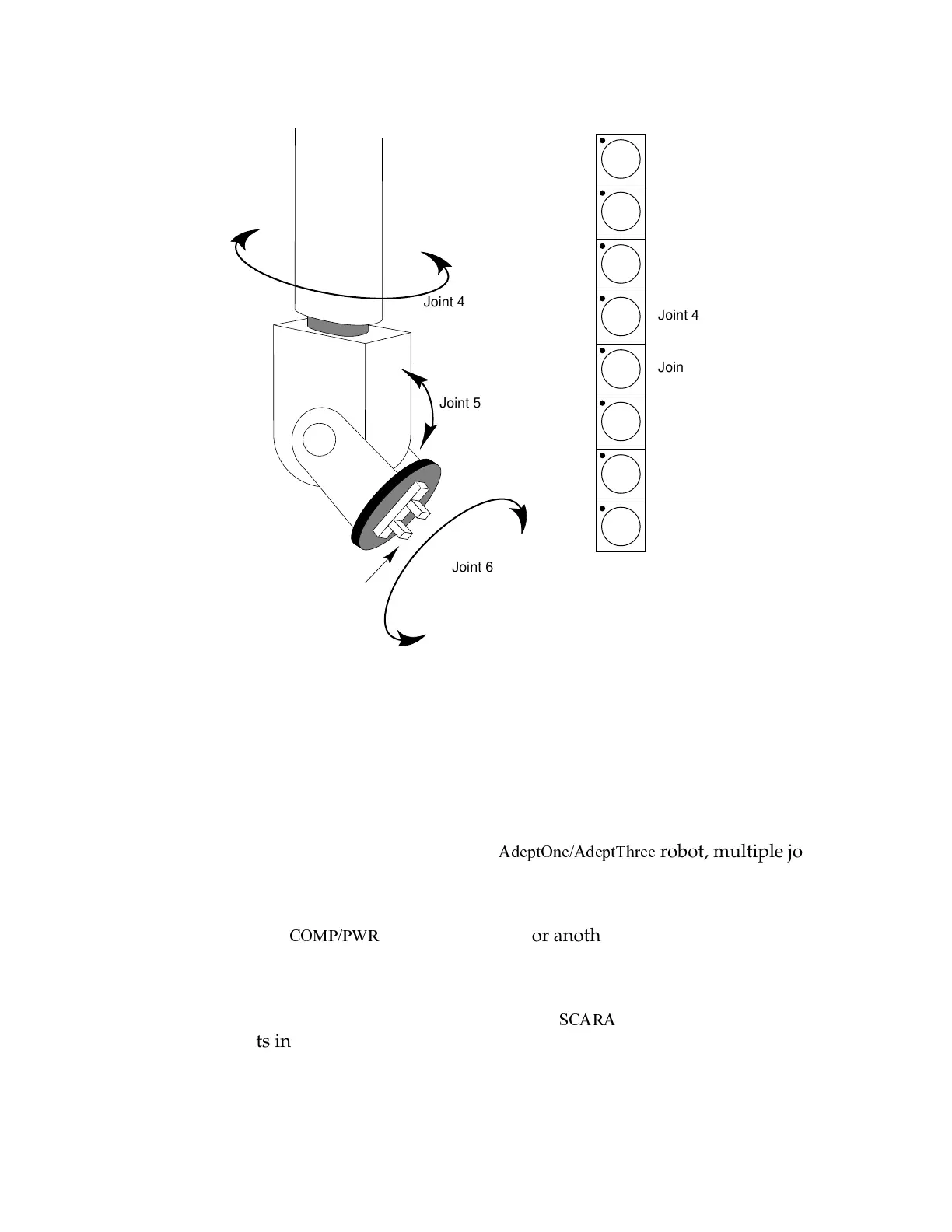
Figure D-17. JOINT State (Six-Axis Robot)
Free State
When free state is selected, individual joints are freed from servo control, and the
robot brakes (if any) are released. Unlike the other states, you can make multiple
selections from the manual control buttons to free as many joints as required. In
some cases, such as Joints 1 and 2 on an
*3
robot, multiple joints
are freed by selecting a single button. On some robots Free mode may have been
disabled by the manufacturer on some or all joints.
As soon as the
*.%3%+-
button is pressed, or another selection is made from the
manual control buttons, all joints are placed back under servo control and will not
move freely.
Figure D-18 shows the free state for a four-axis
'-
robot. The joint
assignments in the free state are the same as the joint assignments in joint state.
T
1
RZ
6
RY
5
RX
4
Z
3
Y
2
X
1
T
1
STEP
Joint 4
Joint 5
Joint 6
Joint 4
Joint 5
Joint 6
Gripper
Joint 4
Joint 5
Joint 6
Joint 4
Joint 5
Joint 6
Gripper
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com