Appendix D Manual Control Pendant Basics
236 Adept MV Controller User’s Guide, Rev. B
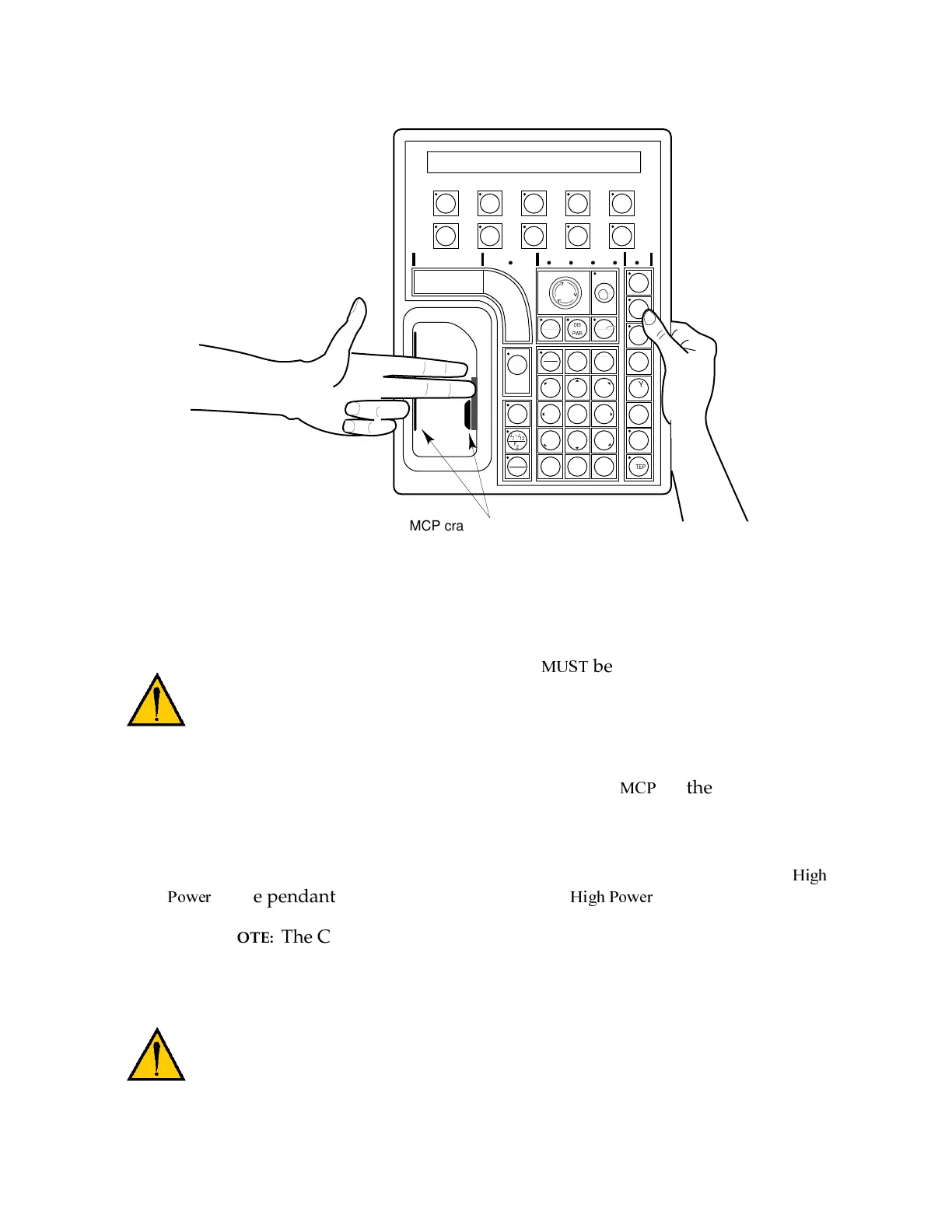
Figure D-2. Cradling the MCP
WARNING: The cradle for the pendant
.&'
be mounted outside of
the robot or motion device work envelope.
Connecting the MCP
The MCP is connected to the 16-pin connector marked
.%
on the CIP (see
“Connecting the MCP to the CIP” on page 96
). The pendant emergency stop
button and the palm-activated enabling switch are wired into the emergency stop
circuitry. Therefore, either the pendant or the optional pendant jumper plug must
be attached to this connector. If neither one is connected, you cannot enable
(
%
. If the pendant or jumper plug is removed,
( %
is turned off.
NOTE: The CIP design allows for an external MCP connection. If
this connection is installed and used, the MCP bypass plug must be
installed on the CIP MCP connector.
CAUTION: Do not modify or extend the MCP cable. Doing this will
void the warranty on the MCP and the CIP.
EDIT DISP
CLR
ERR
CMD
PROG
SET
F
1
+-
0 • DEL
123
456
789
T
1
Z
3
Y
2
X
1
COMP
PWR
RUN
HOLD
MAIN
HALT
REC
DONE
YESNO
WORLD TOOL JOINT FREE DEV
USER
F3
DEV
SLOW
RX
4
RY
5
RZ
6
MCP cradle
retaining clip
STEP
DIS
PWR
F
2
J
7
J
12
–
MCP cradle retaining clip
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com