Appendix D MCP Predefined Functions
244 Adept MV Controller User’s Guide, Rev. B
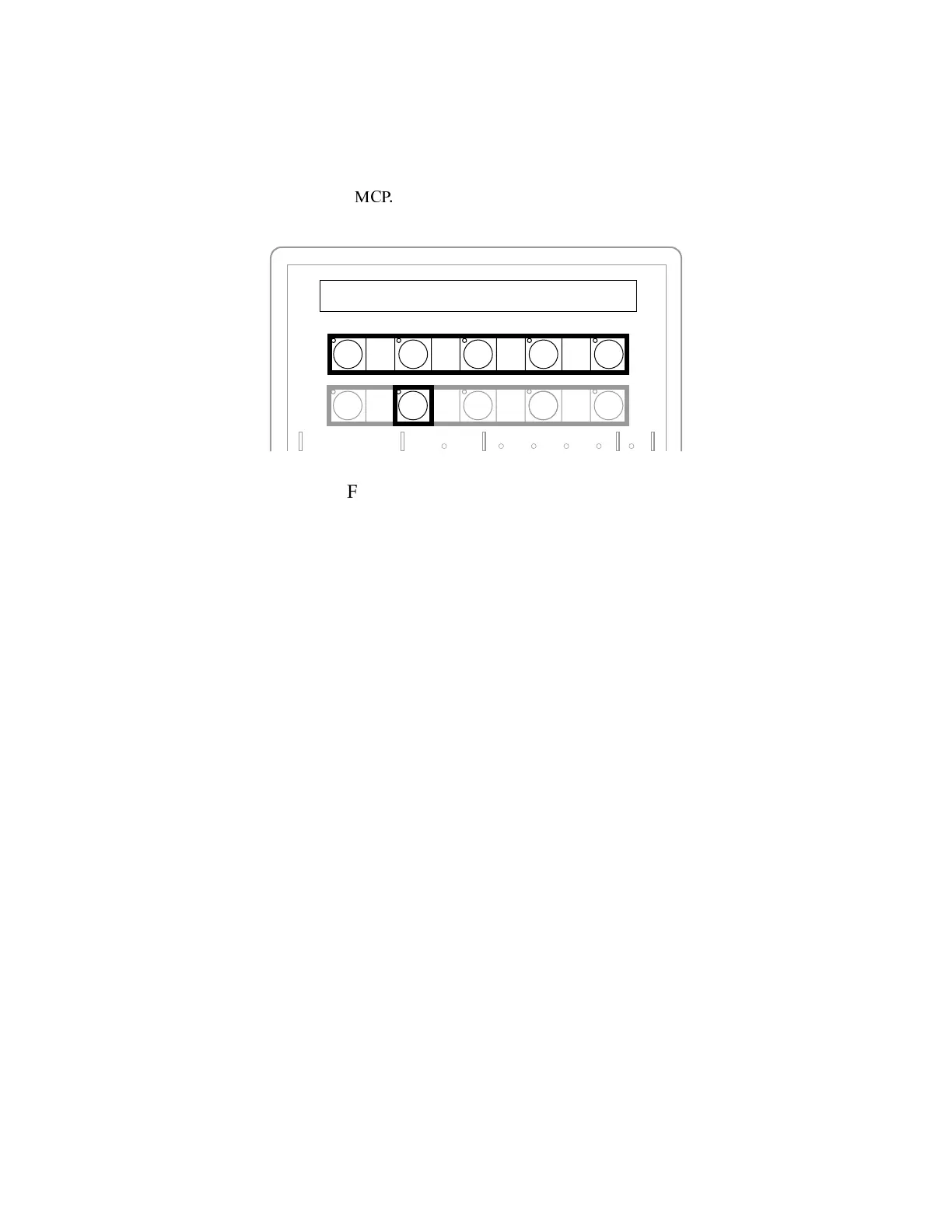
The Display Function
The Display function button allows either the current joint values, the current
world location, the system status, the digital I/O status, or the last error message
to be displayed on the
.%
.
Figure D-7. DISPLAY Function Button
Joint Values When this button is pressed, the display shows:
J1 = x.xx J2 = x.xx J3 = x.xx
J4 = x.xx J5 = x.xx J6 = x.xx
These values represent the current joint positions of the robot or motion device.
Values will be shown only for joints the robot or motion device actually has.
Rotational joint values are expressed in degrees, and translational joint values are
expressed in millimeters.
World Location When this button is pressed, the display shows:
X = xxx.xxmm Y = xxx.xxmm Z = xxx.xxmm
y = xxx.xx° p = xxx.xx° r = xxx.xx°
The values represent the current location of the robot or motion device in world
coordinates. See
“Moving a Robot or Motion Device With the MCP” on page
249
for details on world coordinates.
Status & ID When this button is pressed, the display shows:
Status SOFTWARE CNTRLR ROBOT
ID ID ID ’S
EDIT DISP
CLR
ERR
PROG
SET
CMD
JOINT WORLD STATUS DIGITAL LAST
VALUES LOCATION & ID I/O ERROR
WORLD TOOL JOINT FREE DEV
USER
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com