2. Navigation Tasks
2-3
2.3 Positioning
Positioning means using all available methods available to calculate and keep ship’s position up-to-date during a
voyage.
The calculation of ship’s position is based on available navigation sensors. The system integrates valid information
from different sensors and uses the Kalman filter technology for final position calculation.
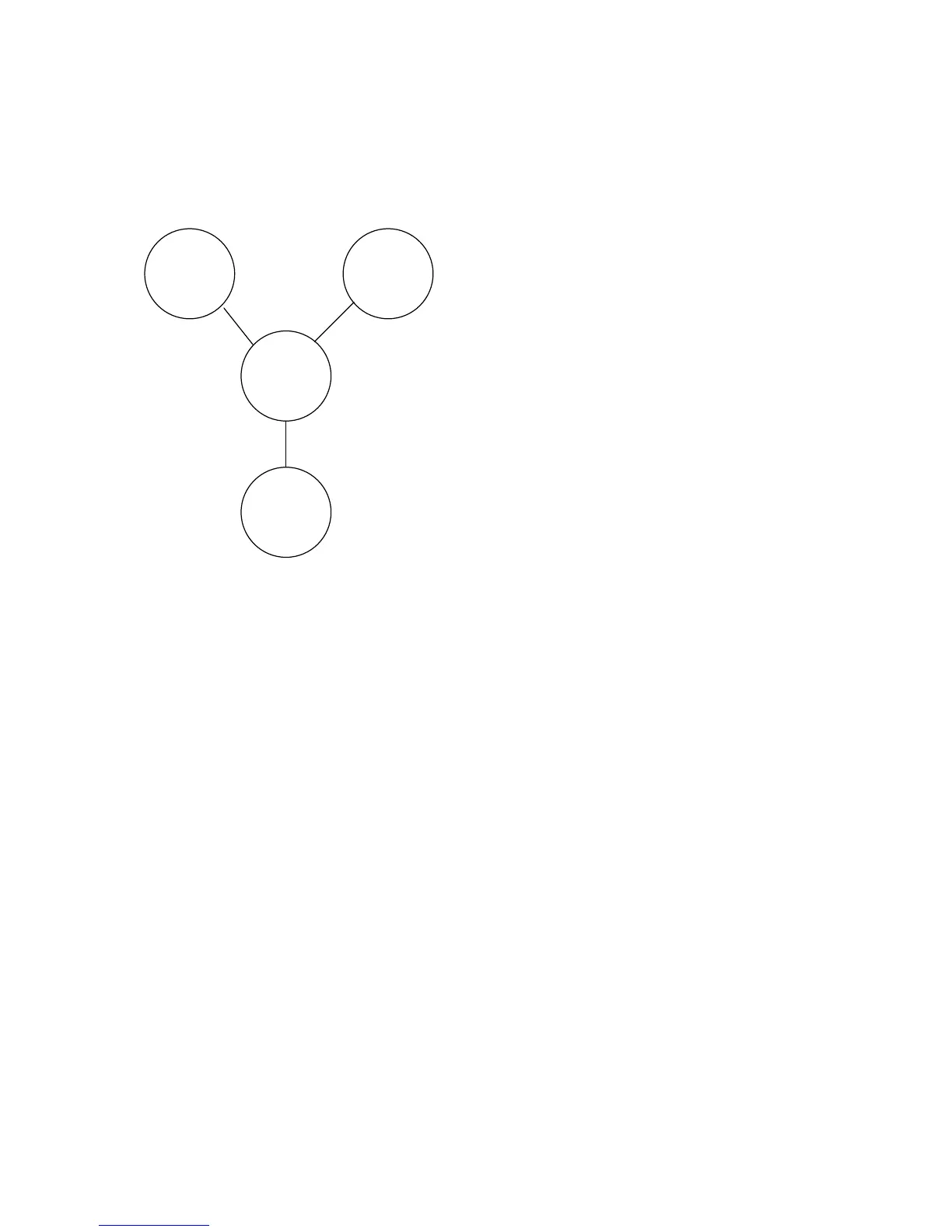
Positioning
Manual
correction
Direct
positioning
sensors
Dead reck.
equipment
2.3.1 Direct positioning sensors
Radio navigation equipment: Satellitenavigation systems:
• Decca navigator • GPS navigator
• Loran-C navigator • GPS navigator with a differential correction, DGPS
• SYLEDIS navigator
• Local position-fixing systems
2.3.2 Dead reckoning equipment
Ship’s heading measurement devices: Speed measuring devices:
• Gyrocompass • Single-axis speed logs
• Magnetic compass • Dual-axis speed logs
• GPS gyrocompass • Radionavigation equipment
• Satellitenavigation equipment
2.3.3 Manual correction
User-executed position correction where radar echoes and information from synthetic charts are combined and
verified by the operator, and adjusted if necessary.