29. Steering With YOKOGAWA Autopilot PT-500A
29-12
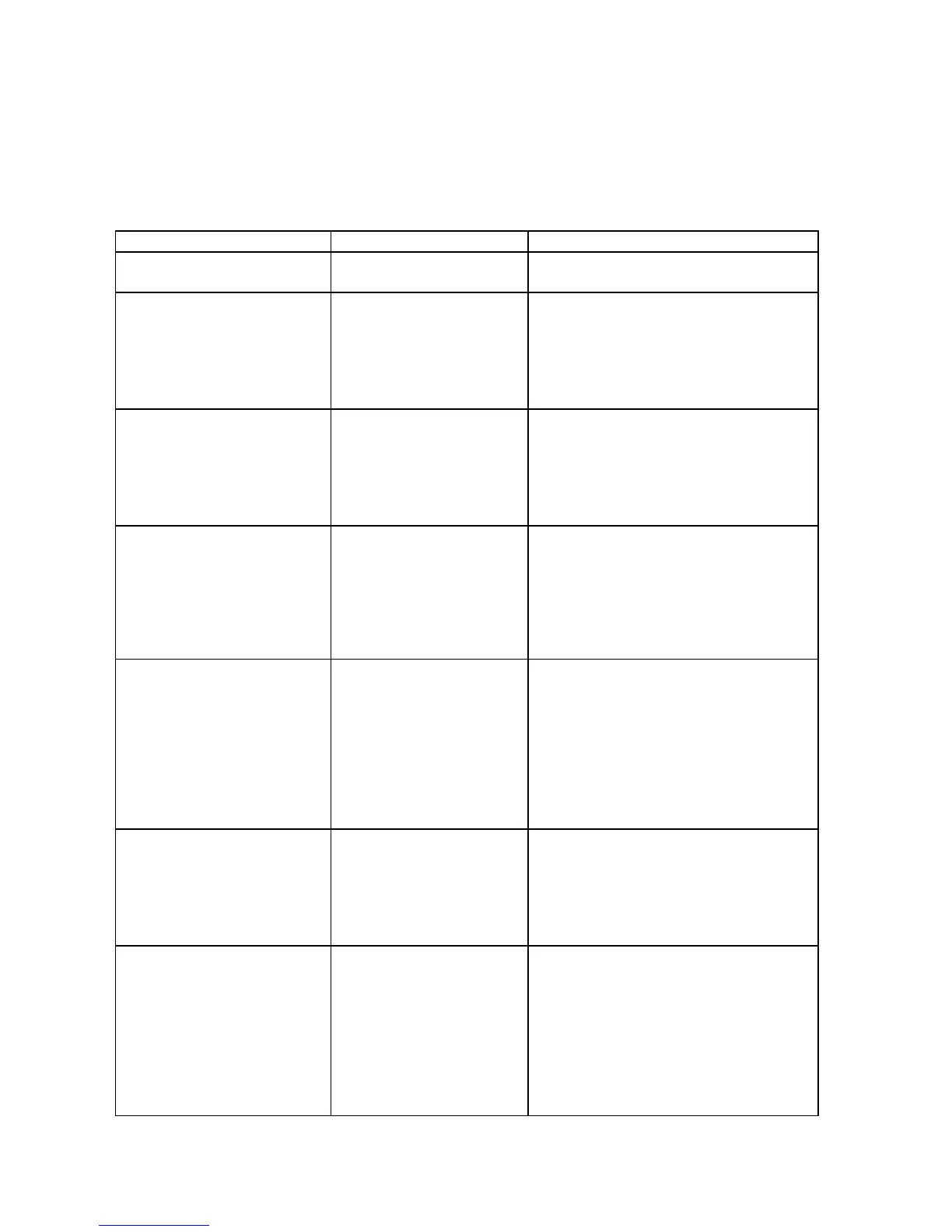
29.7 Expected Steering Performance Under Various
Conditions
The system has many available steering modes. Below is a summary of effect of various environmental conditions
29.7.1 Expected steering performance for going ahead
Environment conditions Heading control = "AUTO" Track = "NAVI"
Calm sea, no wind, no current COG is about the same as Set
Course in Auto Pilot
Drift compensation set as ON or OFF:
vessel follows monitored route
Moderate wind and/or current Vessel has at tendency to drift Drift compensation set as ON:
vessel follows monitored route
Drift compensation set as OFF:
vessel follows monitored route in an off-track
position inside the channel limit
High wind and/or current Vessel is drifting Drift compensation set as ON:
vessel follows monitored route
Drift compensation set as OFF:
vessel may have troubles to follow monitored
route inside the channel limit
Slow change of wind and/or
current
There is no compensation for
change
Drift compensation set as ON:
vessel follows monitored route, but may need
full channel limit area
Drift compensation set as OFF:
vessel may have troubles to follow monitored
route inside the channel limit
Sudden change of wind and/or
current
(For example sudden change
from no current to 5 kt current
perpendicular to track)
There is no compensation for
change
Drift compensation set as ON:
vessel follows monitored route, but may need
full channel limit area
vessel may go outside channel limit and return
back inside channel limit
Drift compensation set as OFF:
vessel may have troubles to follow monitored
route inside the channel limit
Slow change of speed There is no compensation for
change
Drift compensation set as ON:
vessel follows monitored route
Drift compensation set as OFF:
vessel may have troubles to follow monitored
route inside the channel limit
Fast change of speed
(For example speed decrease
from 20 to 7 kt)
There is no compensation for
change
Drift compensation set as ON:
vessel follows monitored route, but may need
full channel limit area
vessel may go outside channel limit and return
back inside channel limit
Drift compensation set as OFF:
vessel may have troubles to follow monitored
route inside the channel limit