28. Steering with FURUNO Autopilot FAP-2000
28-9
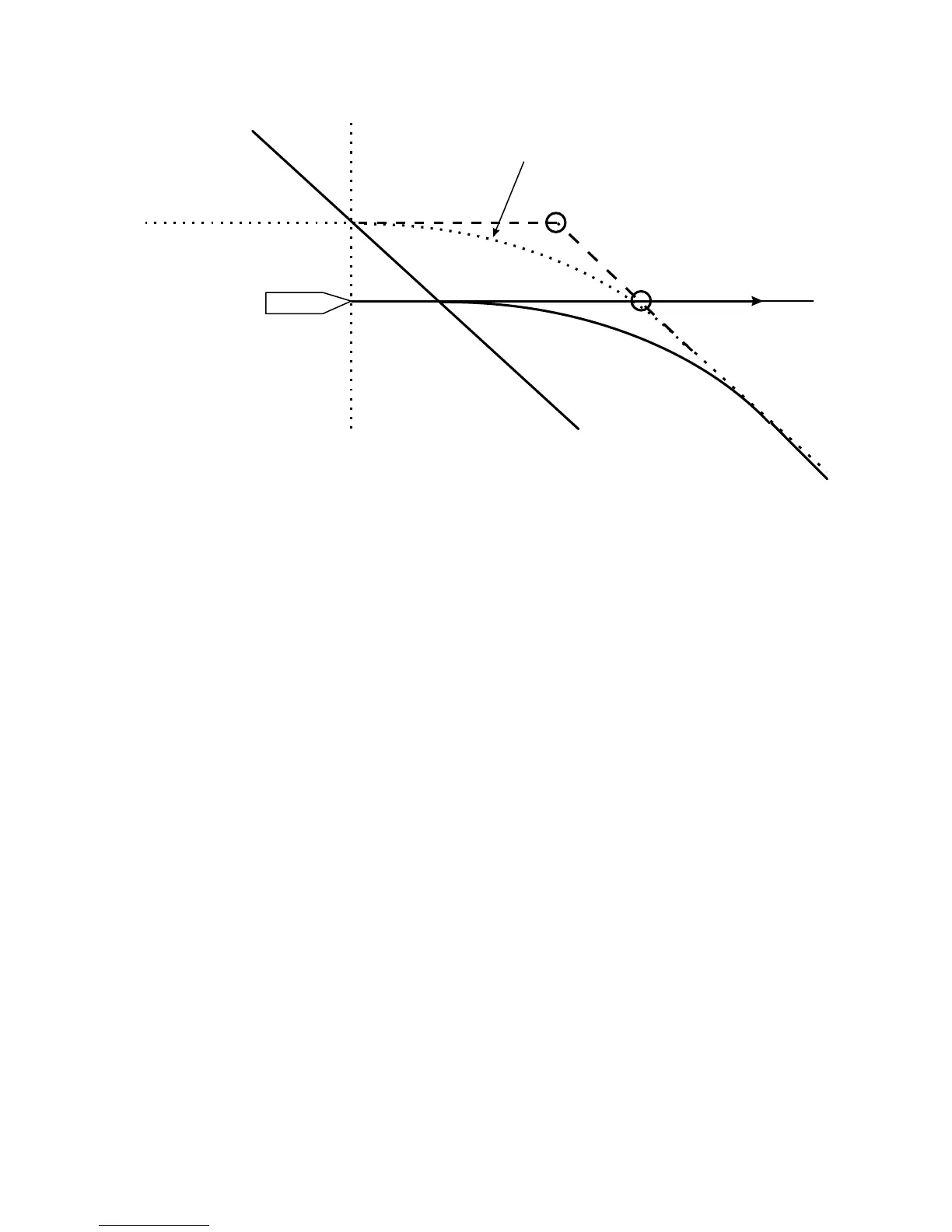
See the figure below to find how location of dynamic WP is defined when the "Go to Waypoint" mode is used.
DYNAMIC WP
Originally planned
WP
Originally planned
turn
Wheel over line
for dynamic WP
Wheel over line
for non-dynamic
WP used by
"Go To Track"
28.5.1 "Goto waypoint" mode
• Mode selection: GO TO WAYPOINT
• GO TO WAYPOINT and ROUTE lamps are lit.
• The tiller can be used to set radius, but not course, which is set automatically.
• Steering is course controlled with set radius.
• If wind, current, etc. affect the ship between waypoints, the system tries to prevent the ship from drifting from
the planned route. The system has three means to prevent drifting from the planned route, and they are most
effective when used together. If cross-track error is used alone, your ship stabilizes typically in a constant off-
track position. The means are:
• Measured cross-track error from the center line, which is always active
• Drift compensation available from route parameters
• Gyro error compensation available from route parameters
• If wind, current, etc. affect the ship during turns, the ship will drift (inside or outside) from the planned turn,
which is displayed on the radar screen. This kind of turn is called an "assisted turn".
• Can be used when the ship has accurate position source available.
• Normally, the Goto Waypoint mode uses the dynamic location of a waypoint. However, if alarm 2013 is active,
a non-dynamic waypoint is used.