19. Navigation Sensors
19-5
Other page
Set and Drift: See description below.
Wind:
Wind (True or North) speed (Kt or m/s) and direction
are displayed. Note that true wind is wind relative to
your ship heading. For further details, see section 19.10
Wind Sensor.
Depth below trans:
Depth from hull at bow and aft to bottom. A depth
alarm value may be entered to alert you to
Temperature:
Water surface temperature.
Water current:
Tide at current position.
AIS targets:
Status of AIS data. Check Danger & Lost Alms to get
alarm for dangerous or lost target. Check Safety Msg
alarm to get alarm when safety messages are received.
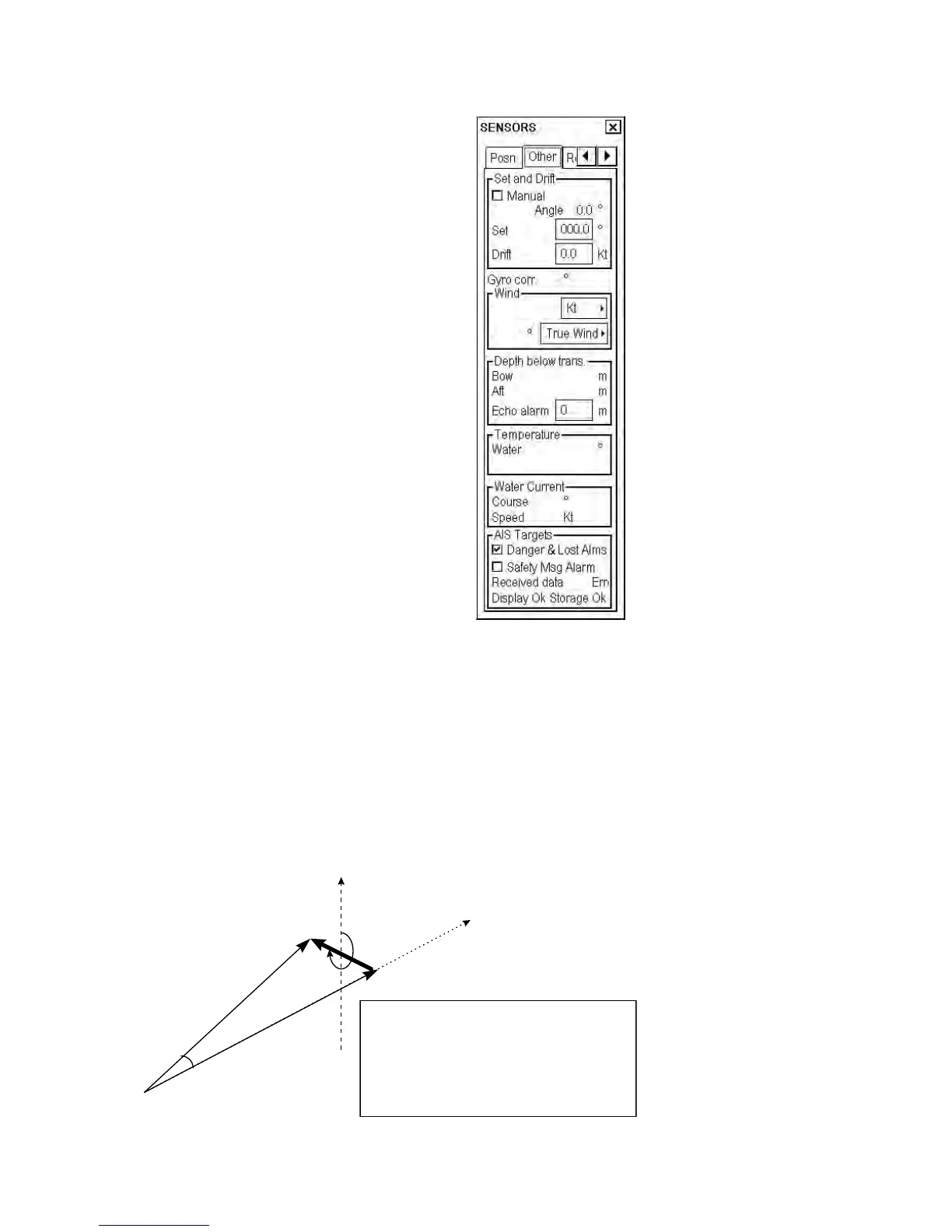
Set and drift:
Check the Manual box to manually set speed and course of drift.
Note that you can choose manual drift only if there are no automatic sources for SOG and COG. In other words, you
have neither a dual-axis log nor any position receiver available.
Angle = Difference between heading and COG
Spd = Speed component of the drift vector
Crs = Course component of the drift vector
Vector defined by (SOG and COG) is equal to vector sum of vectors defined by (SPD and HDG) and (set and drift).
HDG
spd
SOG
COG
a
n
g
l
e
crs
SPD: water speed
HDG: heading of ship
SOG: speed over ground
COG: course over ground
spd: speed of drift
crs: course of drift
angle: difference between HDG and COG
North
SPD
 Loading...
Loading...