224
Program description - Swashplate mixer and Fail-safe
Using the selection keys on the left or right touch pad,
page to the menu option …
Phase settings
Phase assignment
Phase trim
Non-delayed chan
Timers (general)
Fl. phase timers
Wing mixers
Free mixers
MIX active/phase MIX-only channel
Dual mixer
Fail-safe adjust
Phase settings
Phase assignment
Non-delayed chan Timers (general)
Fl. phase timers
Helicopter mixer
Free Mixers
MIX active/phase
MIX-only channel Dual mixer
Swashplate mixer Fail-safe adjust
… on the multi-function menu. Briefl y tap the centre
SET key of the right touch pad to open this menu
option:
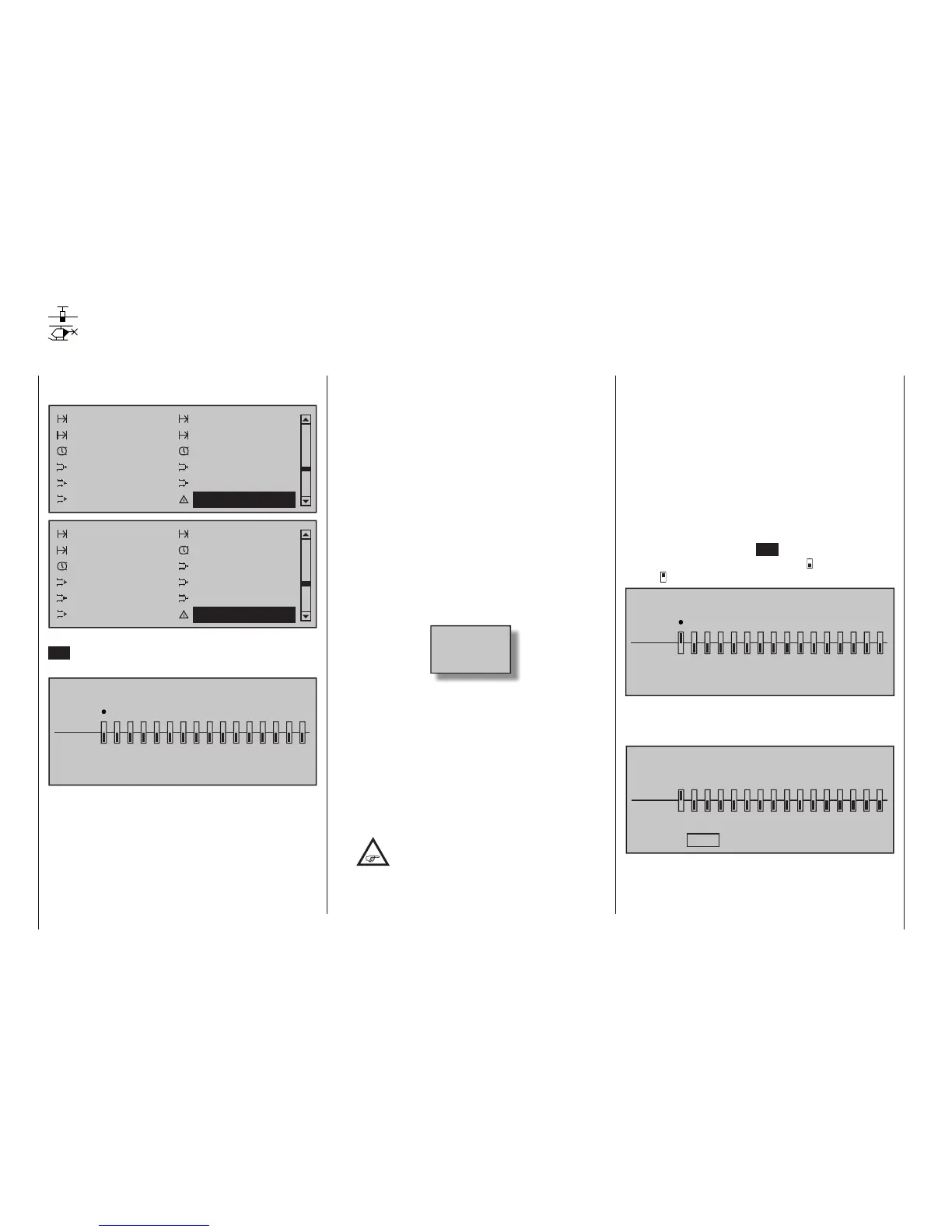
FAIL SAFE
Pos
hold
1
2
3
4
5
6
7 8 9 10 11 12 13 14 15 16
DELAY : 0.25s STO
The higher level of operating safety exhibited by the
HoTT system when compared to traditional PPM
technology results from the fact that the microproces-
sor built into the HoTT receiver not only exclusively
processes the signals of "its" transmitter, but can also
clean up "dirty" control signals that it receives.
Fail-safe
Fault condition setpoints
Only when these signals become too error-prone or
garbled due to outside interference does the proces-
sor automatically replace the disrupted signals with
the last received correct signal, temporarily stored
in the receiver. This feature is confi gured by the
settings as described below. This feature also sup-
presses brief interference caused by e. g. local drops
in fi eld strength, which otherwise result in the familiar
"glitches". In this case, the red LED lights up on the
receiver.
With the built-in function “Power-Fail-Safe” the HoTT
receiver also ensures that after turning the receiver all
servo outputs are supplied with defi ned signals, so for
example, an undercarriage not retract unexpectedly
or similar undesirable happens.
If you have not yet carried out the fail-safe program-
ming, you will see a warning message on the screen
when you switch on the transmitter:
Fail Safe
setup
t.b.d.
Programming procedure
The "Fail Safe" function determines the behavior of
the receiver if communication between the transmitter
and the receiver is disrupted. Receiver outputs 1 …
16 can optionally …
• ... Immediately take after switching the receiving
system and as long as there is no radio connec-
tion to the transmitter, previously stored in the
receiver positions. Completely independent of
whether the corresponding output to “hold” or
“Pos” is programmed.
By default, set to the fi rst save of the
fail-safe positions the centre position.
• ... in the event of a fault either ...
1. preserve the current position ("hold"):
if communication is disrupted, all servos
programmed to "hold" mode remain at the
positions judged to be the last valid positions by
the receiver until the receiver picks up another
valid control signal, or
2. move to a freely selectable position ("Pos") if
interference should occur, following the expiry of
the "time delay".
Use selection keys on the left or right touch pad
to select the desired servo connection 1 … 16 (
)
then briefl y tap the centre SET key of the right touch
pad to freely switch between "hold" ( ) and "Pos"
mode ( ):
FAIL SAFE
Pos
hold
1
2
3
4
5
6
7 8 9 10 11 12 13 14 15 16
DELAY : 0.25s STO
Following this, use the selection keys on the left
or right touch pad to select the "DELAY" option shown
at the bottom of the display …
FAIL SAFE
Pos
hold
1
2
3
4
5
6
7 8 9 10 11 12 13 14 15 16
DELAY : 0.25s STO