10.3.3 STO (Safe Torque Off)
Safe Torque Off description for drive option Functional Safety 1.
STO is suited for SIL 2 according to IEC 62061 and PLd / Cat.3 according to ISO 13849-1. STO is a type A
subsystem according to IEC 61508.
STO turns off the drive output stage that powers the motor. STO function corresponds to an uncontrolled stop
according to IEC 60204-1, category 0.
10.3.3.1 Important Notes
The safety properties given in this documentation refers to the device AKD2G with
functional safety option 1. The user has to determine the safety properties of the
safety chain.
Vertical load could fall!
Serious injury could result when a suspended load is not properly blocked. The
drive cannot hold a vertical load when STO is active.
l
Add a safe mechanical blocking (for instance, a motor-holding brake).
10.3.3.2 Activation
The digital STO inputs (channel A and B) must be connected to the output of a safety device, which at least meets
the requirements of PLd, Cat.3 according to ISO13849. Technical data of the safe inputs (➜ # 184).
If one of the STO inputs goes open-circuit or 0V, then power supply to the motor stops within 3.5ms. The motor will
lose all torque and coast to a stop.
If the drive detects that the two STO inputs are in a different state for longer than 100 ms, then a simultaneity fault
F9005 occurs (➜ # 188).
Review the enclosure and wiring instructions (➜ #
182).
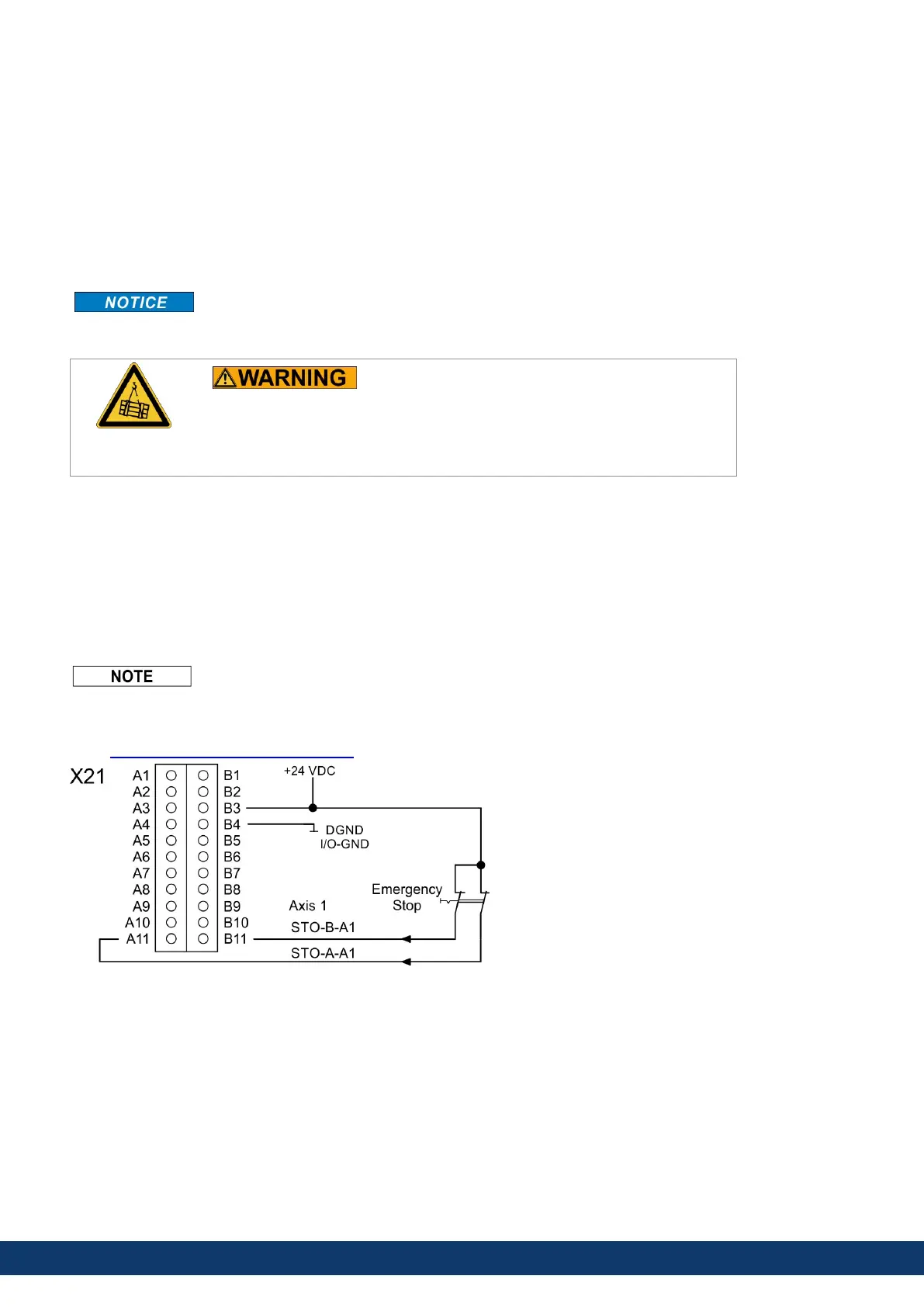
Wiring example STO single axis, SIL2/PLd, Emergency Stop
Note: AXIS#.SAFE.STO.REPORTFAULT should be set to 1 if STO is activated by a switch.
AKD2G-S Installation Manual, Safety 1
Kollmorgen | kdn.kollmorgen.com | S103, March 2023 185

 Loading...
Loading...



