- 113 -
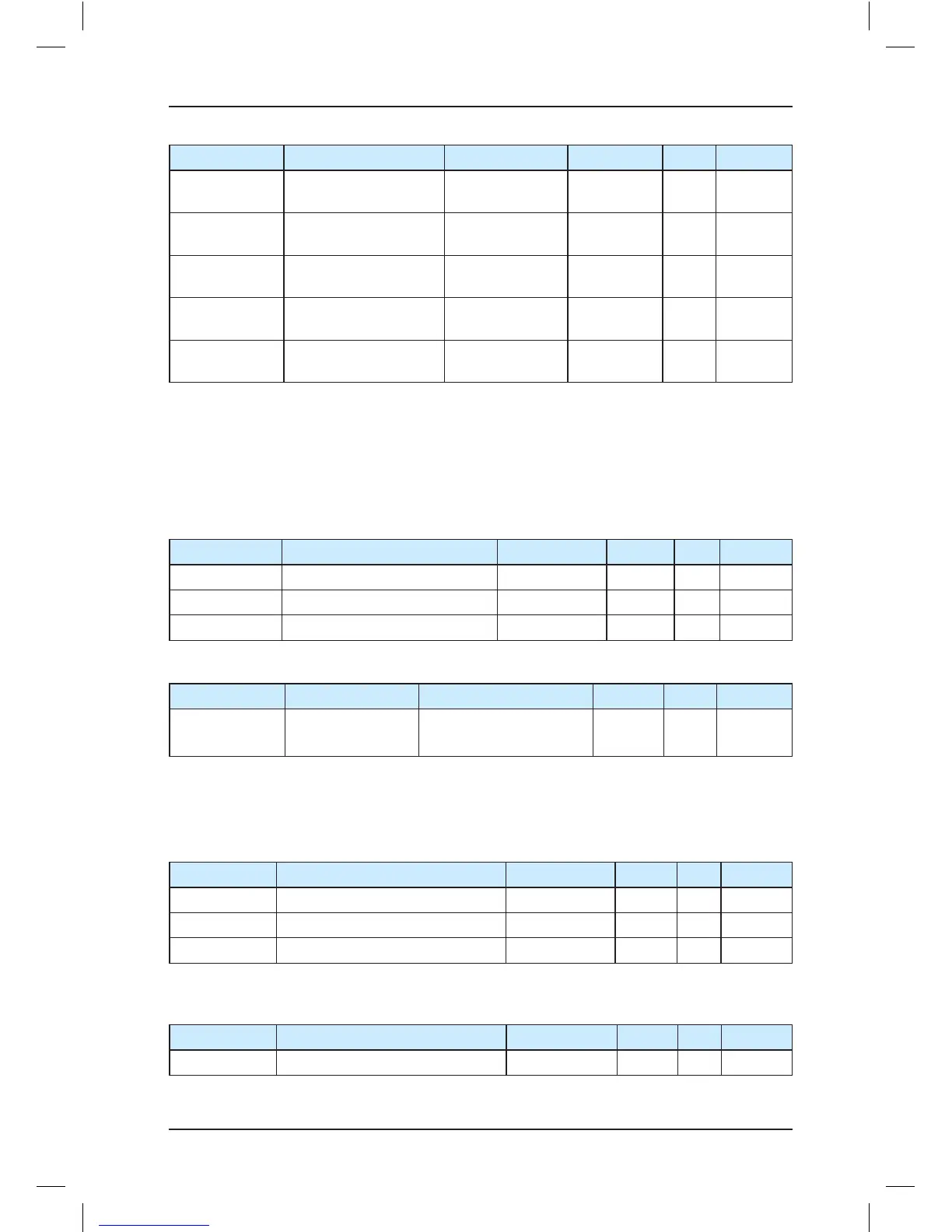
Function Code Parameter Name Setting Range Default Unit Property
F1-14
Stator resistance
(asynchronous motor)
0.000–30.000
Model
dependent
Ω
★
F1-15
Rotor resistance
(asynchronous motor)
0.000–30.000
Model
dependent
Ω
★
F1-16
Leakage inductance
(asynchronous motor)
0.00–300.00
Model
dependent
mH
★
F1-17
Mutual inductance
(asynchronous motor)
0.1–3000.0
Model
dependent
mH
★
F1-18
Magnetizing current
(asynchronous motor)
0.01–300.00
Model
dependent
A
★
These parameters are obtained by means of motor auto-tuning. After the motor auto-tuning
is completed successfully, the values of these parameters are updated automatically.
If motor auto-tuning cannot be performed onsite, manually enter the values by referring to
data of the motor with the same nameplate parameters.
Each time F1-01 (Rated motor power) of the asynchronous motor is modified, these
parameters automatically resume to the default values for the standard motor.
Function Code Parameter Name Setting Range Default Unit Property
F1-19 Shaft Q inductance (torque) 0.00–650.00 3.00 mH
★
F1-20 Shaft D inductance (excitation) 0.00–650.00 3.00 mH
★
F1-21 Back EMF 0–65535 0 -
★
These parameters are obtained by means of motor auto-tuning.
Function Code Parameter Name Setting Range Default Unit Property
F1-25 Motor type
0: Asynchronous motor
1: Synchronous motor
1 - ★
It is used to set the motor type. This parameter must be set correctly before motor auto-
tuning; otherwise, the motor auto-tuning cannot be performed.
Group F2: Vector Control Parameters
Function Code Parameter Name Setting Range Default Unit Property
F2-00 Speed loop proportional gain KP1 0–100 40 -
★
F2-01 Speed loop integral time TI1 0.01–10.00 0.60 s
★
F2-02 Switchover frequency 1 0.00 to F2-05 2.00 Hz
★
F2-00 and F2-01 are PI regulation parameters when the running frequency is smaller than
the value of F2-02 (Switchover frequency 1).
Function Code Parameter Name Setting Range Default Unit Property
F2-03 Speed loop proportional gain KP2 0–100 35 -
★