- 114 -
Function Code Parameter Name Setting Range Default Unit Property
F2-04 Speed loop integral time TI2 0.01–10.00 0.80 s
★
F2-05 Switchover frequency 2 F2-02 to F0-05 5.00 Hz
★
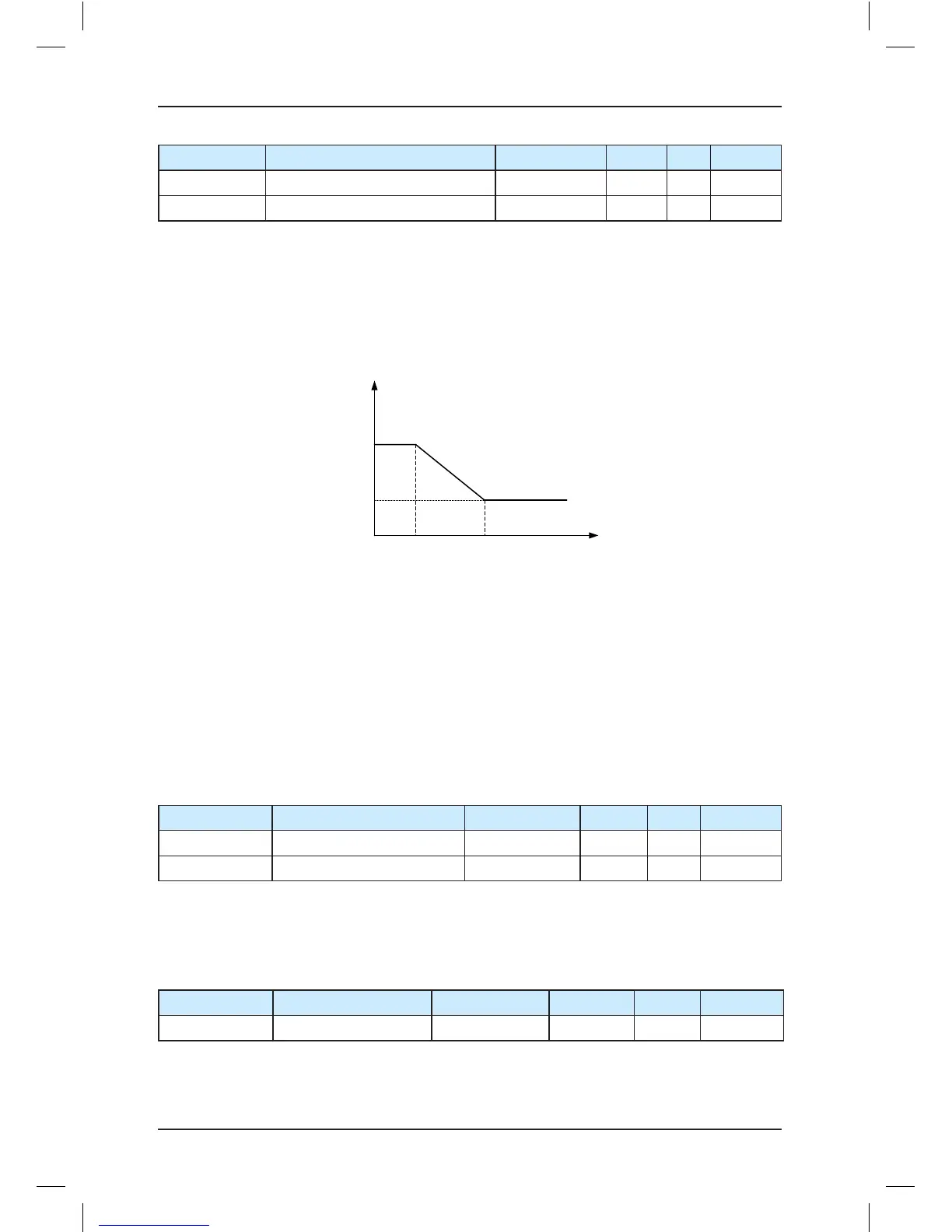
F2-03 and F2-04 are PI regulation parameters when the running frequency is larger than the
value of F2-05 (Switchover frequency 2).
If the running frequency is between F2-02 and F2-05, the speed loop PI parameters are
obtained from the weighted average value of the two groups of PI parameters (F2-00, F2-01
and F2-03, F2-04), as shown in Figure 7-1.
Figure 7-1 Relationship between running frequencies and PI parameters
The speed dynamic response characteristics in vector control can be adjusted by setting the
proportional gain and integral time of the speed regulator.
To achieve a faster system response, increase the proportional gain and reduce the integral
time. Be aware that this may lead to system oscillation.
The recommended adjustment method is as follows:
If the default setting cannot meet the requirements, make proper adjustment. Decrease
the proportional gain rst to ensure that the system does not oscillate, and then reduce the
integral time to ensure that the system has quick response and small overshoot.
If both F2-02 (Switchover frequency 1) and F2-05 (Switchover frequency 2) are 0, only F2-
03 and F2-04 are valid.
Function Code Parameter Name Setting Range Default Unit Property
F2-06 Current loop KP1 (torque) 10–500 60 %
★
F2-07 Current loop KI1 (torque) 10–500 30 %
★
These two parameters are regulation parameters for the torque axis current loop.
These parameters are used as the torque axis current regulator in vector control. The best
values of the parameters matching the motor characteristics are obtained by means of
motor auto-tuning. You need not modify them generally.
Function Code Parameter Name Setting Range Default Unit Property
F2-08 Torque upper limit 0.0–200.0 150.0 %
★
It is used to set the torque upper limit of the motor. The value 100% corresponds to the rated
output torque of the adaptable motor.