- 19 -
service life of the capacitor inside the controller.
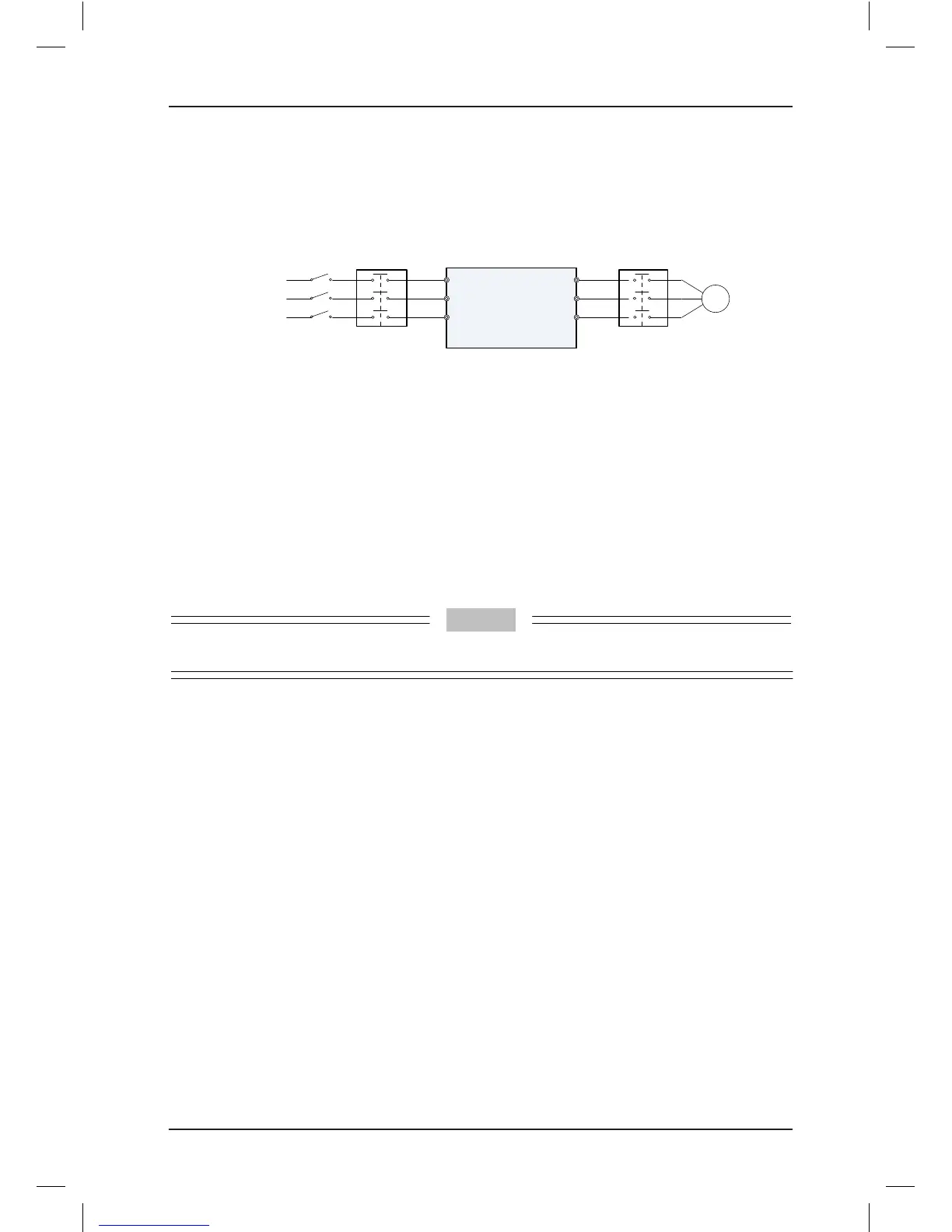
When a contactor is installed between the output side of the controller and the motor, do not
turn off the contactor when the controller is active. Otherwise, modules inside the controller
may be damaged.
8. Use outside the rated voltage
The controller must not be used outside the allowable voltage range specified in this
manual. Otherwise, components inside the controller may be damaged. If required, use a
corresponding voltage step-up or step-down device.
9. Surge suppressor
The controller has a built-in voltage dependent resistor (VDR) for suppressing the surge
voltage generated when the inductive loads (electromagnetic contactor, electromagnetic
relay, solenoid valve, electromagnetic coil and electromagnetic brake) around the controller
are switched on or off. If the inductive loads generate very high surge voltage, use a surge
suppressor for the inductive load or use a surge suppressor together with a diode.
Do not connect the surge suppressor on the output side of the controller.
10. Altitude and de-rating
In places where the altitude is above 1000 m and the cooling effect reduces due to thin air, it
is necessary to de-rate the controller. Contact Monarch for technical support.
11. Disposal
The electrolytic capacitors on the main circuits and PCB may explode when they are
burnt. Poisonous gas is generated when the plastic parts are burnt. Treat them as ordinary
industrial waste.
12. Adaptable motor
The controller is adaptable to squirrel-cage asynchronous motor or AC PMSM. Select a
proper controller according to motor nameplate.
The default parameters configured inside the controller are squirrel-cage asynchronous
motor parameters. It is still necessary to perform motor auto-tuning or modify the default
values based on actual conditions. Otherwise, the running effect and protection performance
will be affected. For PMSM, motor auto-tuning must be performed.
13. Precautions on selecting residual-current circuit breaker (RCCB)
Tripping may be caused if an improper RCCB is selected when the controller drives the
motor. This is because the output wave of the controller has high harmonics and the motor