- 163 -
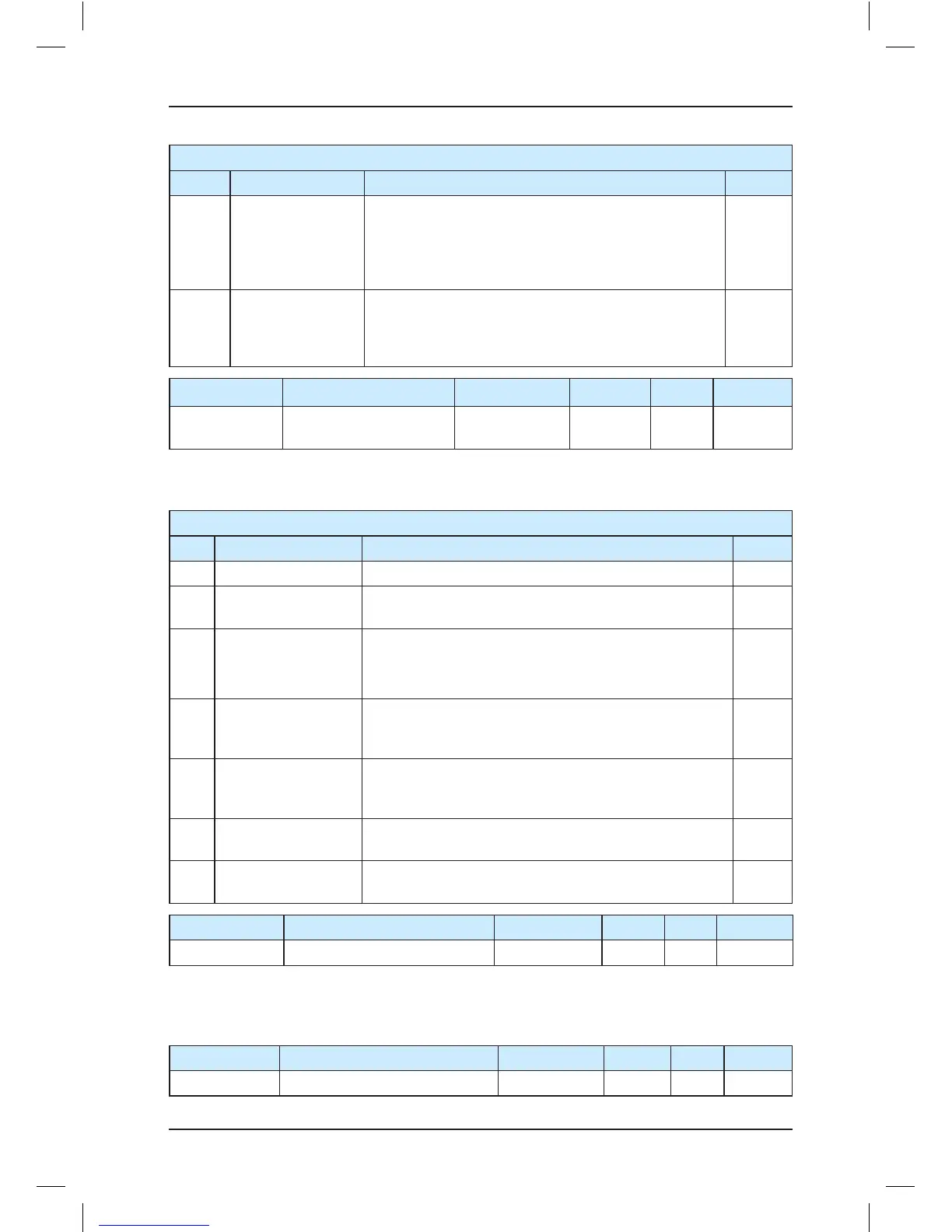
FC-00 Program control for protection function
Bit Function Description Default
Bit2
Decelerating to
stop at valid light
curtain
During normal-speed running, the elevator decelerates
to stop immediately after the light curtain acts, and
then runs to the registered destination oor after the
light curtain restores. This function is mainly used in
the case of manual door.
0
Bit3
Password
ineffective if no
operation within 30
minutes
If you does not perform operation 30 minutes after
entering the password, the operation panel exits the
function code interface automatically. You need to
enter the password again to perform operation.
0
Function Code Parameter Name Setting Range Default Unit Property
FC-01
Program control 2 for
protection function
0–65535 1 -
★
It is used to set program control related to protection functions. "1" indicates that the function
is enabled, and "0" indicates that the function is disabled.
FC-01 Program control 2 for protection function
Bit Function Description Default
Bit0 Overload protection It sets whether to implement overload protection. 1
Bit1
Canceling protection
at output phase loss
It sets whether to implement protection at output phase
loss.
0
Bit2
Canceling over-
modulation
It sets whether to implement over-modulation.
0: Over-modulation enabled
1: Over-modulation disabled
0
Bit4
Light curtain
judgment at door
close limit
At door close limit, the door re-opens if the light curtain
is valid.
0
Bit5
Canceling SPI
communication
judgment
It sets whether to implement wire-breaking detection
on SPI communication between the MCB and the drive
board.
0
Bit9
Canceling Err55
alarm
The system does not report fault Err55 when the door
open limit signal at arrival becomes inactive.
0
Bit14
Canceling protection
at input phase loss
It sets whether to implement protection at input phase
loss.
0
Function Code Parameter Name Setting Range Default Unit Property
FC-02 Overload protection coefcient 0.50–10.00 1.00 -
★
After detecting that the output current exceeds (FC-02 x Rated motor current) and the
duration lasts the time specied in the inverse time lag curve, the system outputs fault Err11
indicating motor overload.
Function Code Parameter Name Setting Range Default Unit Property
FC-03 Overload pre-warning coefcient 50–100 80 %
★