- 66 -
If both F2-02 (Switchover frequency 1) and F2-05 (Switchover frequency 2) are set to 0,
only F2-03 and F2-04 are valid.
Function
Code
Parameter Name
Setting
Range
Default Description
F2-06 Current loop proportional gain 10–500 60
F2-06 and F2-07 are the
current loop adjustment
parameters in the vector
control algorithm.
F2-07 Current loop integral gain 10–500 30
The optimum values of these two parameters are obtained during motor auto-tuning, and
you need not modify them. Appropriate setting of the parameters can restrain jitter during
running and have obvious effect on the riding comfort.
Function
Code
Parameter Name Setting Range Default Description
F2-18
Startup acceleration
time
0.000–1.500s 0.000s
It can reduce the terrace
feeling at startup caused by the
breakout friction of the guide
rail.
F3-00 Startup speed 0.000–0.030 m/s 0.000 m/s
F3-01 Startup holding time 0.000–0.500s 0.000s
F3-14
Zero-speed control
time at startup
0.000–1.000s 0.200s
It species the zero speed
holding time before brake
output.
F3-15 Brake release delay 0.000–2.000s
0.200s
0.600s
It species the brake release
time.
F3-16
Zero-speed control
time at end
0.000–1.000s 0.300s
It species the zero speed
holding time after the brake is
applied.
F8-11 Brake apply delay 0.200–1.500s 0.200s It species the brake apply time.
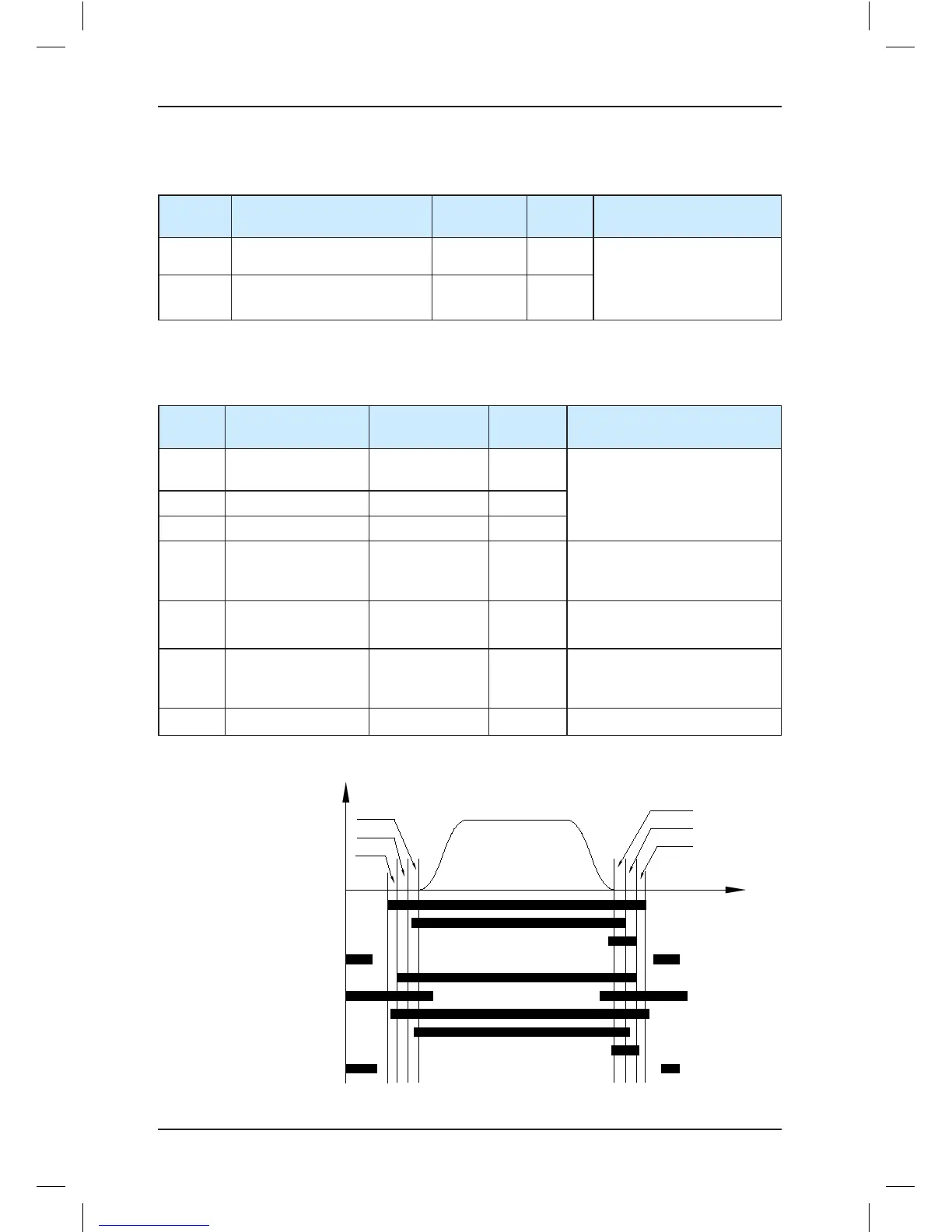
Figure 5-5 Running time sequence