- 60 -
4. Check the grounding.
Check that the resistance between the following points and the ground is close to innity.
־ R, S, T and PE
־ U, V, W and PE
־ 24V and PE on the MCB
־ Motor U, V, W and PE
־ +, – bus terminals and PE
־ Safety circuit, door lock circuit, and inspection circuit terminals and PE
5. Check the grounding terminals of all elevator electrical components and the power supply
of the control cabinet.
5.1.2 Setting and Auto-tuning of Motor Parameters
The NICE1000
new
supports two major control modes, sensorless vector control (SVC)
and closed-loop vector control (CLVC). SVC is applicable to inspection speed running for
commissioning and fault judgment running during maintenance of the asynchronous motor.
CLVC is applicable to normal elevator running. In CLVC mode, good driving performance
and running efciency can be achieved in the prerequisite of correct motor parameters.
■
Motor Parameters to Be Set
The motor parameters that need to be set are listed in the following table.
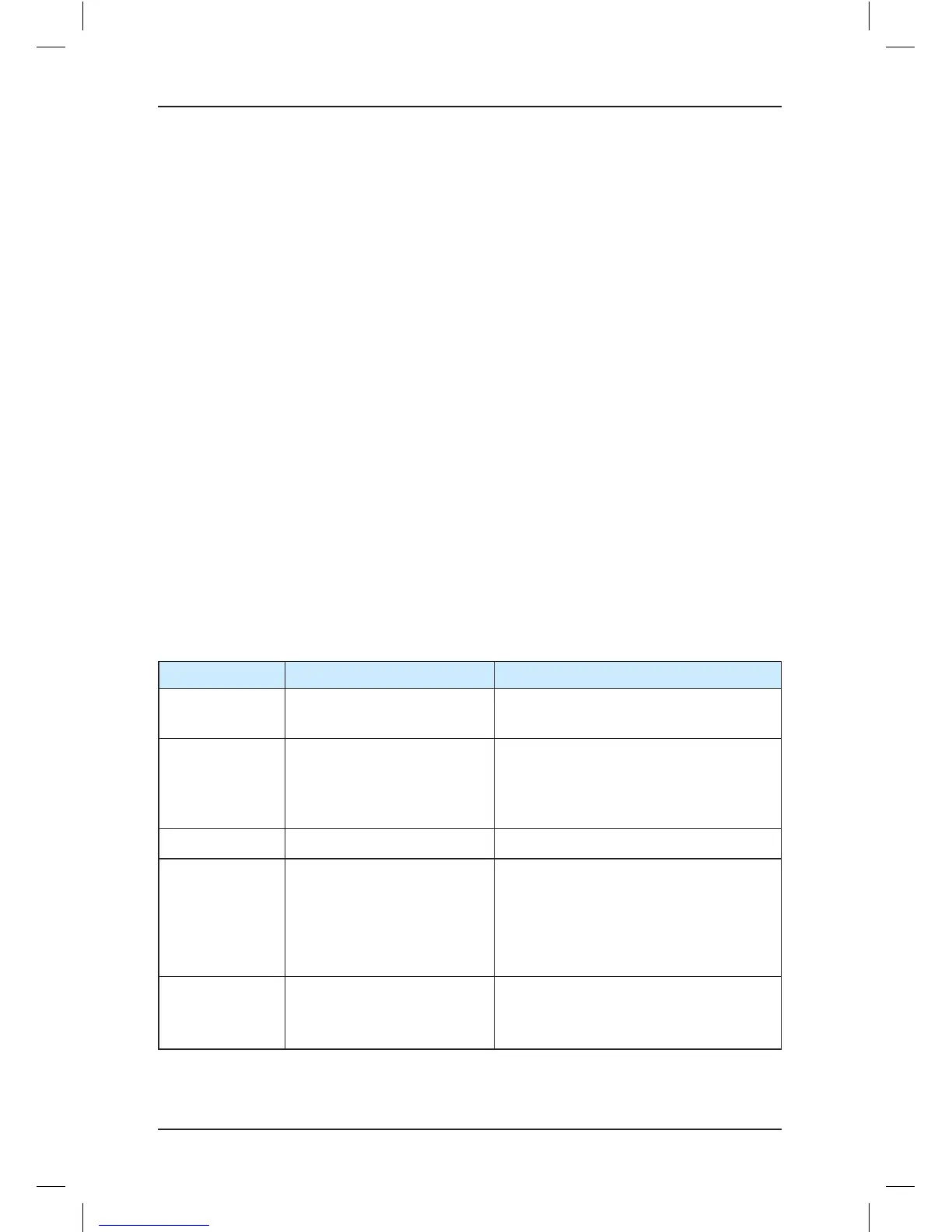
Table 5-1 Motor parameters to be set
Function Code Parameter Name Description
F1-25 Motor type
0: Asynchronous motor
1: Synchronous motor
F1-00 Encoder type
0: SIN/COS encoder, absolute encoder
1: UVW encoder
2: AB incremental encoder (for
asynchronous motor)
F1-12 Encoder pulses per revolution 0–10000
F1-01 to F1-05
Rated motor power
Rated motor voltage
Rated motor current
Rated motor frequency
Rated motor rotational speed
These parameters are model dependent,
and you need to manually input them
according to the nameplate.
F0-00 Control mode
0: Sensorless vector control (SVC)
1: Closed-loop vector control (CLVC)
2: Voltage/Frequency (V/F) control