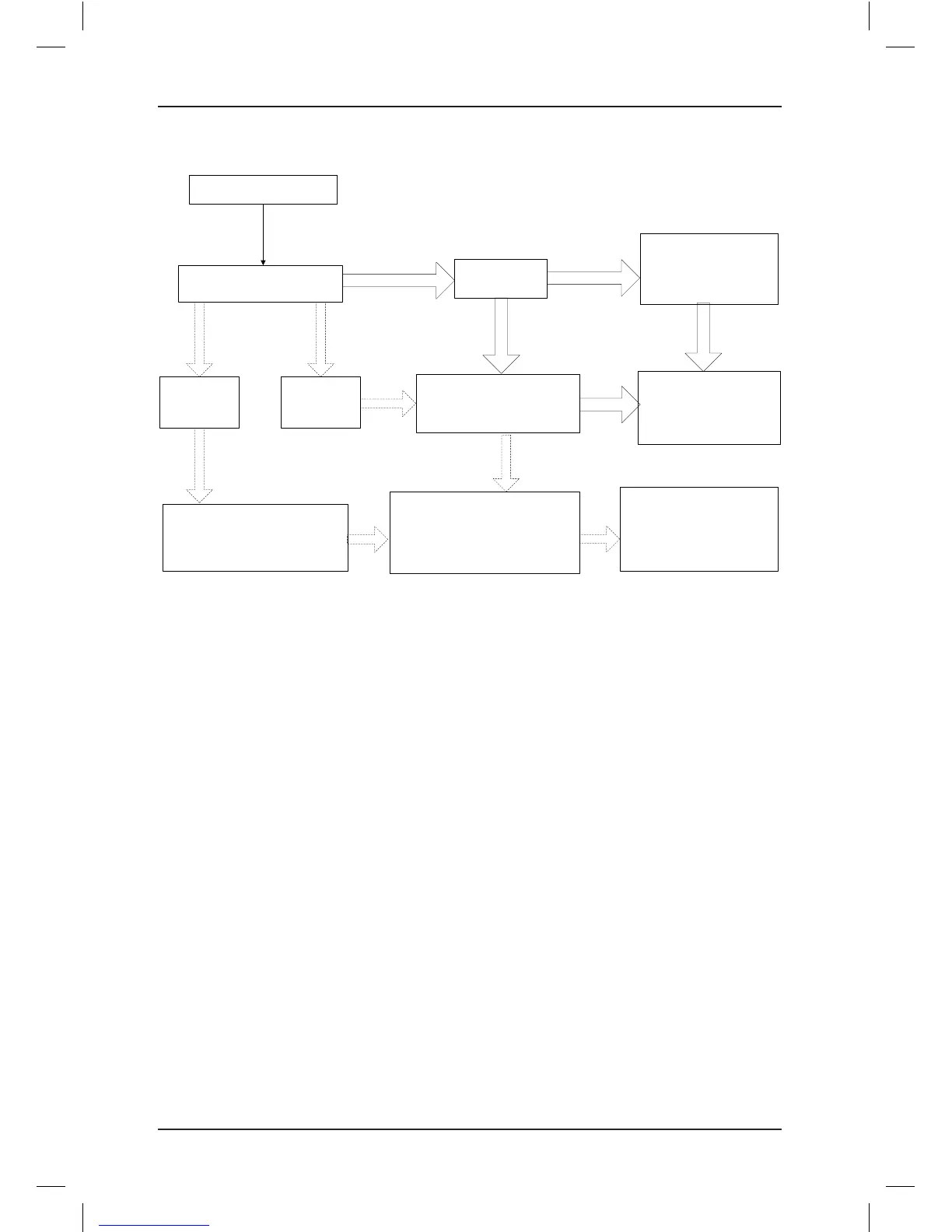
Set F1-25 correctly based on
the actually used motor type
Set encoder parameters F1-00
and F1-12 and motor parameters
F1-01 to F1-05 correctly
Set F0-01 to 0
(Operation panel
control)
For with-load auto-tuning,
set F1-11 to 1. After the
operation panel displays
"TUNE", press the RUN key.
Static motor auto-tuning
starts.
F1-25 = 0
(Asynchronous
motor)
With-load
auto-tuning
F1-25 = 1
(Synchronous motor)
With-load auto-tuning
F0-01 = 1
F1-11 = 1
F0-01 = 0
F1-11 = 2
For no-load auto-tuning, set F1-11
to 2. The operation panel displays
"TUNE". Release the brake
manually and press the RUN key.
Motor auto-tuning starts.
After motor parameters F1-14
to F1-18 are obtained,
restore F0-01 to 1 (Distance
control). Motor auto-tuning is
completed.
Check the initial angle and wiring mode
of the encoder (F1-06 and F1-08) after
motor auto-tuning. Perform motor auto-
tuning multiple times and ensure that
the difference between values of F1-06
is within 5° and values of F1-08 are the
same.
After motor parameter values
(F1-06 to F1-08, F1-14, F1-19 to
F1-20) and current loop
parameters are obtained, restore
F0-01 to 1 (Distance control).
Motor auto-tuning is completed.
No-load auto-tuning
No-load auto-tuning
For with-load auto-tuning, set F1-11 to
1. After the operation panel displays
"TUNE", press the UP/DOWN button
for inspection to start auto-tuning. The
motor starts to run.
More descriptions of motor auto-tuning are as follows:
1) When the NICE1000
new
drives the synchronous motor, an encoder is required to provide
feedback signals. You must set the encoder parameters correctly before performing motor
auto-tuning.
2) For synchronous motor auto-tuning:
a. In the no-load auto-tuning and with-load auto-tuning, the motor needs to rotate. The best
auto-tuning mode is no-load auto-tuning; if this mode is impossible, then try with-load auto-
tuning.
b. Perform three or more times of auto-tuning, compare the obtained values of F1-06
(Encoder initial angle). The value deviation of F1-06 shall be within ±5°, which indicates that
the auto-tuning is successful.
c. With-load auto-tuning learns stator resistance, shaft-D and shaft-Q inductance, current
loop (including zero servo) PI parameters, and encoder initial angle. No-load auto-tuning
additionally learns the encoder wiring mode.
d. After wiring phase sequence of the motor is changed or the encoder is replaced, perform
motor auto-tuning again.
3) For asynchronous motor:
With-load auto-tuning learns stator resistance, rotor resistance, and leakage inductance,
and automatically calculates the mutual inductance and motor magnetizing current. No-
load auto-tuning learns the mutual inductance, motor magnetizing current, and current loop
parameters.