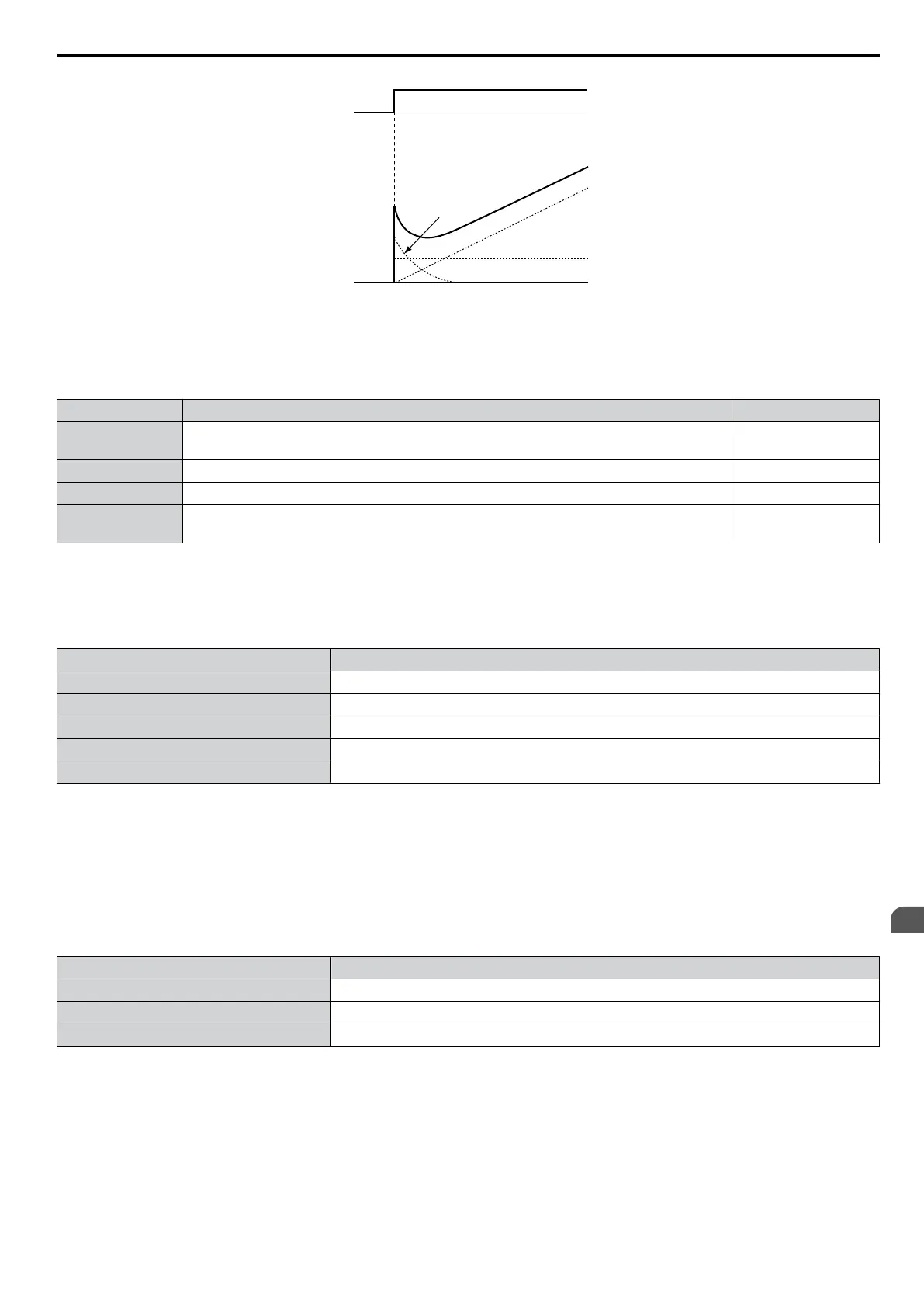
PID input
I control
PID Output
D control
Time
PID output
Time
P control
Figure 5.16 PID Operation
n
Using PID Control
Applications for PID control are listed in the table below.
Application Description Sensors Used
Speed Control
Machinery speed is fed back and adjusted to meet the target value. Synchronous control
is performed using speed data from other machinery as the target value
Tachometer
Pressure Maintains constant pressure using pressure feedback. Pressure sensor
Fluid Control Keeps flow at a constant level by feeding back flow data. Flow rate sensor
Temperature
Control
Maintains a constant temperature by controlling a fan with a thermostat.
Thermocoupler,
Thermistor
n
PID Setpoint Input Methods
When the PID control parameter b5-01 is set to 1 or 2, the frequency reference in b1-01 (or b1-15) becomes the PID
setpoint. If b5-01 is set to 3 or 4, then the PID setpoint can be input from one of the sources in the following table.
Table 5.6 PID Setpoint Sources
PID Setpoint Source Settings
Analog Input A1 Set H3-02 = C
Analog Input A2 Set H3-10 = C
MEMOBUS/Modbus Register 0006H Set Bit 1 in register 000FH to 1 and input the setpoint to register 0006H
Pulse Input RP Set H6-01 = 2
Parameter b5-19 Set parameter b5-18 = 1 and input the PID setpoint to b5-19
Note: A duplicate allocation of the PID setpoint input will result in an OPE alarm.
n
PID Feedback Input Methods
Either one feedback signal can be input for normal PID control or two feedback signals can be input for controlling a
differential process value.
Normal PID Feedback
The PID feedback can be input from one of the sources listed below.
Table 5.7
PID Feedback Sources
PID Feedback Source Settings
Analog Input A1 Set H3-02 = B
Analog Input A2 Set H3-10 = B
Pulse Input RP Set H6-01 = 1
Note: A duplicate allocation of the PID feedback input will result in an OPE alarm.
Differential Feedback
The second PID feedback signal for differential feedback
can come from the sources listed below. The differential feedback
function is automatically enabled when a differential feedback input is assigned.
5.2 b: Application
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual
131
5
Parameter Details

 Loading...
Loading...















