u
F: Options
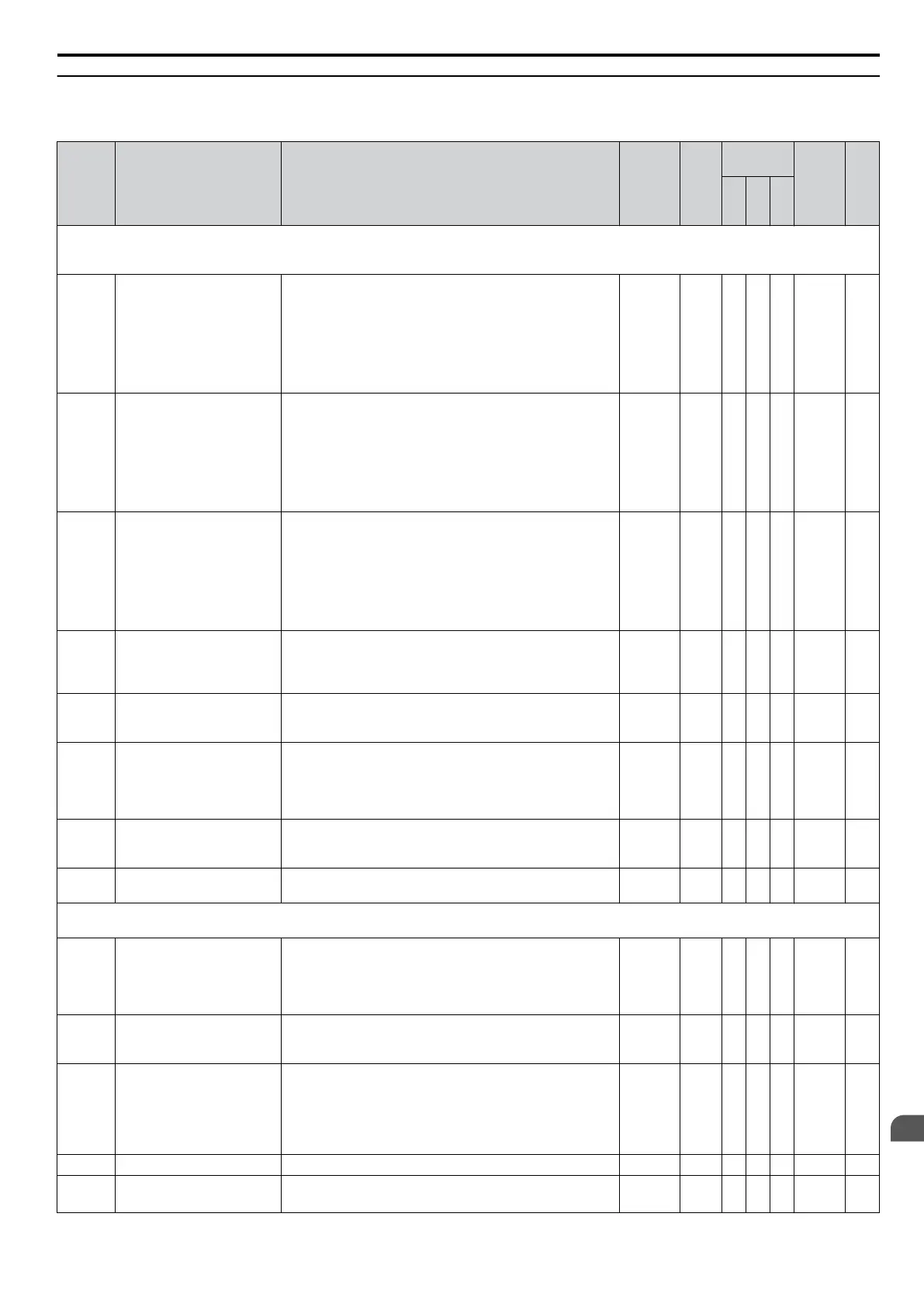
F parameters are used to program the drive for PG feedback and to function with option cards.
No. Name Description Range Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M
F1: V/f Control with Simple PG Feedback - PG Setup Parameters
Use F1 parameters to set up the drive for V/f Control with Simple PG Feedback.
These parameters are enabled only when H6-01 = 03
F1-02
Operation Selection at PG
Open Circuit (PGo)
Sets stopping method when a PG open circuit fault (PGo)
occurs. Refer to parameter F1-14.
0: Ramp to Stop - Decelerate to stop using the active
deceleration time.
1: Coast to Stop
2: Fast-stop - Decelerate to stop using the deceleration time
in C1-09.
3: Alarm only - Drive continues operation.
0 to 3 1 A − − 381 173
F1-03
Operation Selection at
Overspeed (oS)
Sets the stopping method when an overspeed (oS) fault
occurs. Refer to F1-08 and F1-09.
0: Ramp to stop - Decelerate to stop using the active
deceleration time.
1: Coast to stop
2: Fast-stop - Decelerate to stop using the deceleration time
in C1-09.
3: Alarm Only - Drive continues operation.
0 to 3 1 A − − 382 173
F1-04
Operation Selection at
Deviation
Sets the stopping method when a speed deviation (dEv) fault
occurs. Refer to F1-10 and F1-11.
0: Ramp to stop - Decelerate to stop using the active
deceleration time.
1: Coast to stop
2: Fast-stop - Decelerate to stop using the deceleration time
in C1-09.
3: Alarm only - Drive continues operation.
0 to 3 3 A − − 383 173
F1-08 Overspeed Detection Level
Sets the speed feedback level which has to be exceeded for
the time set in F1-09 before an oS fault will occur.
Set as a percentage of the maximum output frequency
(E1-04).
0 to 120 115% A − − 387 173
F1-09
Overspeed Detection Delay
Time
Sets the time in seconds for which the speed feedback has to
exceed the overspeed detection level F1-08 before an oS
fault will occur.
0.0 to 2.0 1.0 A − − 388 173
F1-10
Excessive Speed Deviation
Detection Level
Sets the allowable deviation between motor speed and
frequency reference before a speed deviation fault (dEv) is
triggered.
Set as a percentage of the maximum output frequency
(E1-04).
0 to 50 10% A − − 389 173
F1-11
Excessive Speed Deviation
Detection Delay Time
Sets the time in seconds for which a deviation between motor
speed and frequency reference has to exceed the speed
deviation detection level F1-10 before a dEv fault will occur.
0.0 to
10.0
0.5 s A − − 38A 173
F1-14
PG Open-Circuit Detection
Time
Sets the time for which no PG pulses must be detected before
a PG Open (PGo) fault is triggered.
0.0 to
10.0
2.0 s A − − 38D 174
F6: Serial Communications Option Card Settings
Use F6 parameters to program the drive for serial communication.
F6-01
Communications Error
operation Selection
Selects the operation after a communications error occurred.
0: Ramp to stop using current accel/decel time
1: Coast to stop
2: Fast-stop using C1-09
3: Alarm only
0 to 3 1 A A A 3A2 174
F6-02
External fault from comm.
option selection
Sets when an external fault from a comm option is detected.
0: Always detected
1: Detection during Run only
0, 1 0 A A A 3A3 174
F6-03
External fault from comm.
option operation selection
Selects the operation after an external fault set by a
communications option (EF0).
0: Ramp to stop using current accel/decel time
1: Coast to stop
2: Fast-stop using C1-09
3: Alarm only
0 to 3 1 A A A 3A4 174
F6-04 Bus Error Detection Time Set the delay time for error detection if a bus error occurs. 0.0 to 5.0 2.0 s A A A 3A5 –
F6-07
<6>
NetRef/ComRef Function
Selection
0: Multi-step reference disabled (same as F7)
1: Multi-step reference enabled (same as V7)
0, 1 0 A A A 3A8 174
B.2 Parameter Table
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual
347
B
Parameter List

 Loading...
Loading...















