B.7 Parameters that Change with the Motor Code Selection
The following tables show parameters and default settings that change with the motor code selection E5-01 when Open
Loop Vector for PM motors is used.
u
Yaskawa SMRA Series SPM Motor
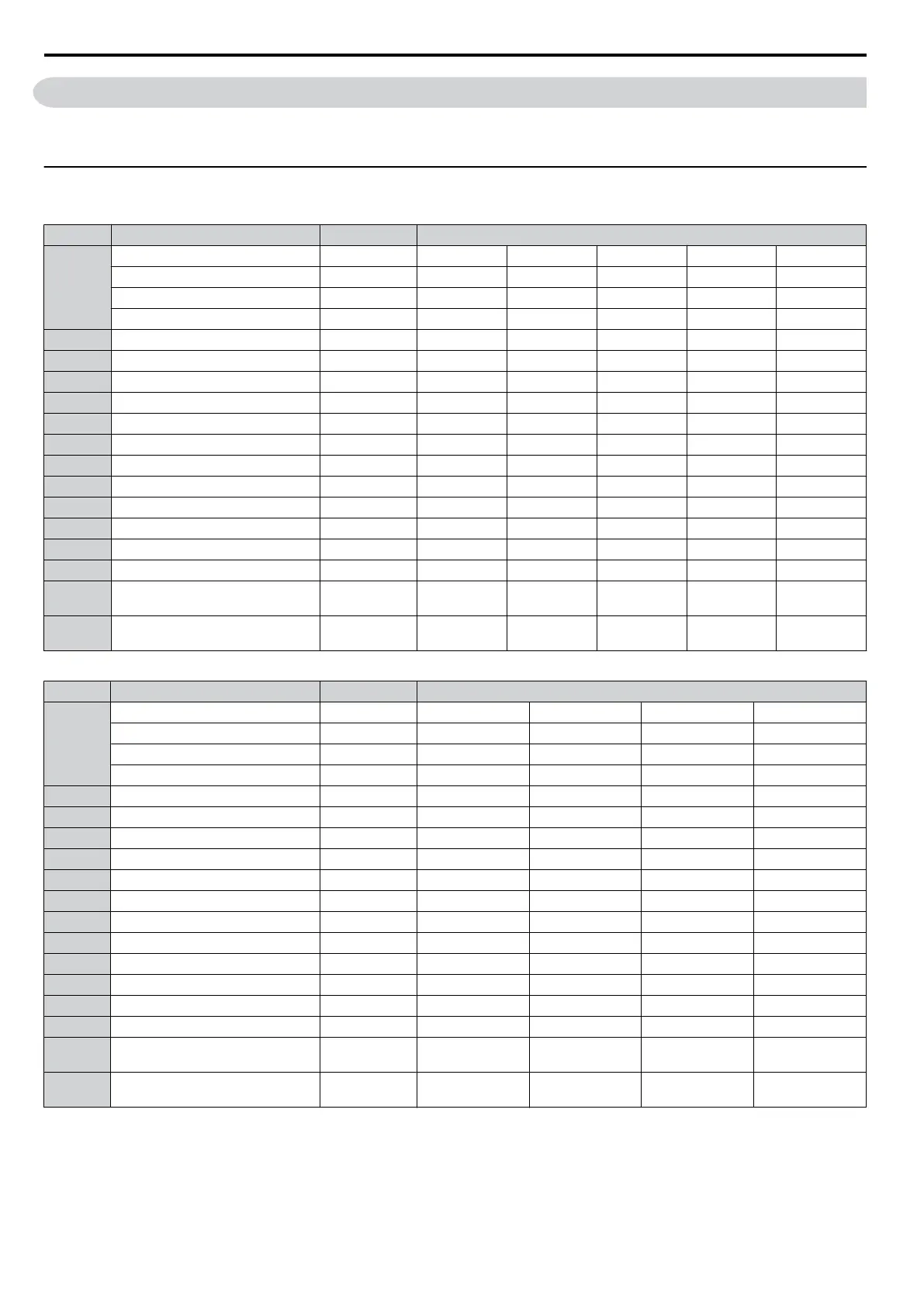
Table B.9 1800 rpm Type Yaskawa SMRA Series SPM Motor Settings
Par. Description Unit Default Settings
E5-01
Motor Code − 0002 0003 0005 0006 0008
Voltage Class − 200 Vac 200 Vac 200 Vac 200 Vac 200 Vac
Rated Power − 0.4 kW 0.75 kW 1.5 kW 2.2 kW 3.7 kW
Rated Speed r/min 1800 1800 1800 1800 1800
E5-02 Motor Rated Power kW 0.4 0.75 1.5 2.2 3.7
E5-03 Motor Rated Current A 2.1 4.0 6.9 10.8 17.4
E5-04 Motor Pole Number – 8 8 8 8 8
E5-05 Motor Winding Resistance Ω 2.47 1.02 0.679 0.291 0.169
E5-06 d-Axis Inductance mH 12.7 4.8 3.9 3.6 2.5
E5-07 q-Axis Inductance mH 12.7 4.8 3.9 3.6 2.5
E5-09 Induction Voltage Constant 1 mVs/rad 0 0 0 0 0
E5-24 Induction Voltage Constant 2 mV/(r/min) 62.0 64.1 73.4 69.6 72.2
E1-04 Maximum Output Frequency Hz 120 120 120 120 120
E1-05 Maximum Output Voltage V 200.0 200.0 200.0 200.0 200.0
E1-06 Base Frequency Hz 120 120 120 120 120
E1-09 Minimum Output Frequency Hz 6 6 6 6 6
L3-24
Motor Acceleration Time for Inertia
Calculations
s 0.064 0.066 0.049 0.051 0.044
n8-49
d-Axis Current for High-Efficiency
Control
% 0 0 0 0 0
Table B.10 3600 rpm Type Yaskawa SMRA Series SPM Motor Settings
Par. Description Unit Default Settings
E5-01
Motor Code − 0103 0105 0106 0108
Voltage Class − 200 Vac 200 Vac 200 Vac 200 Vac
Rated Power − 0.75 kW 1.5 kW 2.2 kW 3.7 kW
Rated Speed r/min 3600 3600 3600 3600
E5-02 Motor Rated Power kW 0.75 1.5 2.2 3.7
E5-03 Motor Rated Current A 4.1 8.0 10.5 16.5
E5-04 Motor Pole Number – 8 8 8 8
E5-05 Motor Winding Resistance Ω 0.538 0.20 0.15 0.097
E5-06 d-Axis Inductance mH 3.2 1.3 1.1 1.1
E5-07 q-Axis Inductance mH 3.2 1.3 1.1 1.1
E5-09 Induction Voltage Constant 1 mVs/rad 0 0 0 0
E5-24 Induction Voltage Constant 2 mV/(r/min) 32.4 32.7 36.7 39.7
E1-04 Maximum Output Frequency Hz 240 240 240 240
E1-05 Maximum Output Voltage V 200.0 200.0 200.0 200.0
E1-06 Base Frequency Hz 240 240 240 240
E1-09 Minimum Output Frequency Hz 12 12 12 12
L3-24
Motor Acceleration Time for Inertia
Calculations
s 0.137 0.132 0.132 0.122
n8-49
d-Axis Current for High-Efficiency
Control
% 0 0 0 0
B.7 Parameters that Change with the Motor Code Selection
390
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual

 Loading...
Loading...















