<Appendix 5. PID Block>
279
IM 01E21A02-03EN
A5.2 Functions of PID Block
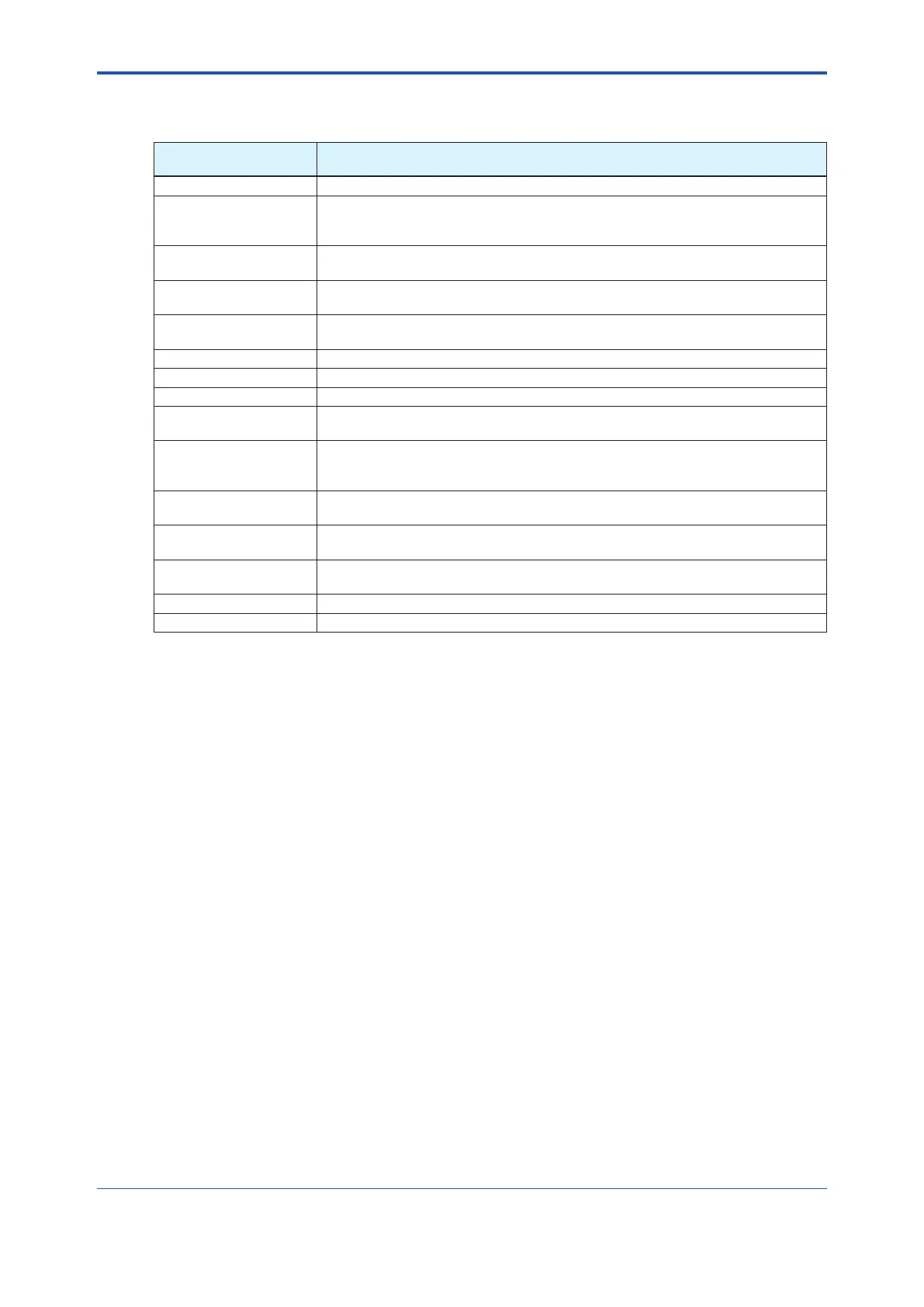
The control calculation processing provided in the PID block has the following functions.
Control Calculation
Processing
Description
PID control Calculates the control output using the PID control algorithm.
Control output action
Convertsthechangeincontroloutput(ΔMV)foreachcontrolperiodtothe
manipulatedvalue(MV)thatistobeactuallyoutput.
Supports“velocitytype”asanoperationofoperationaloutput.
Direction of control action
Switches the action direction of output between forward and reverse based on the
changes in the deviation.
Control action bypass
When the bypass is set, the SP value is scaled to the OUT range and output as
OUT.
Feed-forward
Adds the external compensation value FF_VAL to the output signal from the PID
computation.
Measured-value tracking Equalizesthesetpoint(SP)tothemeasuredvalue(PV).
Setpoint limiter Limitsthevalueofsetpoint(SP)withinthehigh/lowlimits.
External-output tracking ConvertsTRK_VALtothescaleofOUTandoutputsit.
Mode change
The PID block has the following eight modes: O/S, IMan, Lo, Man, Auto, Cas, RCas,
and ROut.
Bumpless transfer
Switchestheoperationaloutputvalue(OUT)withoutasuddenchangeatchanging
blockmodesandswitchingtheoperationaloutputvalue(OUT)atthecascade
downstream block.
Initialization and manual
fallback
ChangesMODE_BLKtoIManandtemporarilysuspendsthecontrolaction.
Operates when initialization and manual fallback conditions are met.
MAN fallback
ChangesMODE_BLKtotheManmodeandtemporarilyabortsthecontrolaction
forcibly.
Auto fallback
ChangesMODE_BLKtoAutowhenMODE_BLKisrunningintheCasmode,and
continues the control action using the setpoint set by the operator.
Mode shedding SpeciestheblockmodewithSHED_OPTafterafailure.
Block alarm processing Supports block alarms, process alarms, and event updates.
 Loading...
Loading...



