<Appendix 5. PID Block>
292
IM 01E21A02-03EN
A5.18 Alarm Processing of Block
There are two kinds of alarms generated by the PID block: Block and process alarms.
A5.18.1 Block Alarm (BLOCK_ALM)
Theblockalarm(BLOCK_ALM)isgeneratedupontheoccurrenceofeitherofthefollowingerrors
(valuessetinBLOCK_ERR)andnotiesthecontentofBLOCK_ERR.
Name Condition
Local Override IfMODE_BLKactualofPIDblockisLO.
Input Failure
If the PV status is Bad, that is, the IN status is Bad, or the IN status is Uncertain
andwhenthe“UseUncertainasGood”bitofSTATUS_OPTSisnotset
Out of Service IfMODE_BLK.targetofthePIDblockistheOSmode.
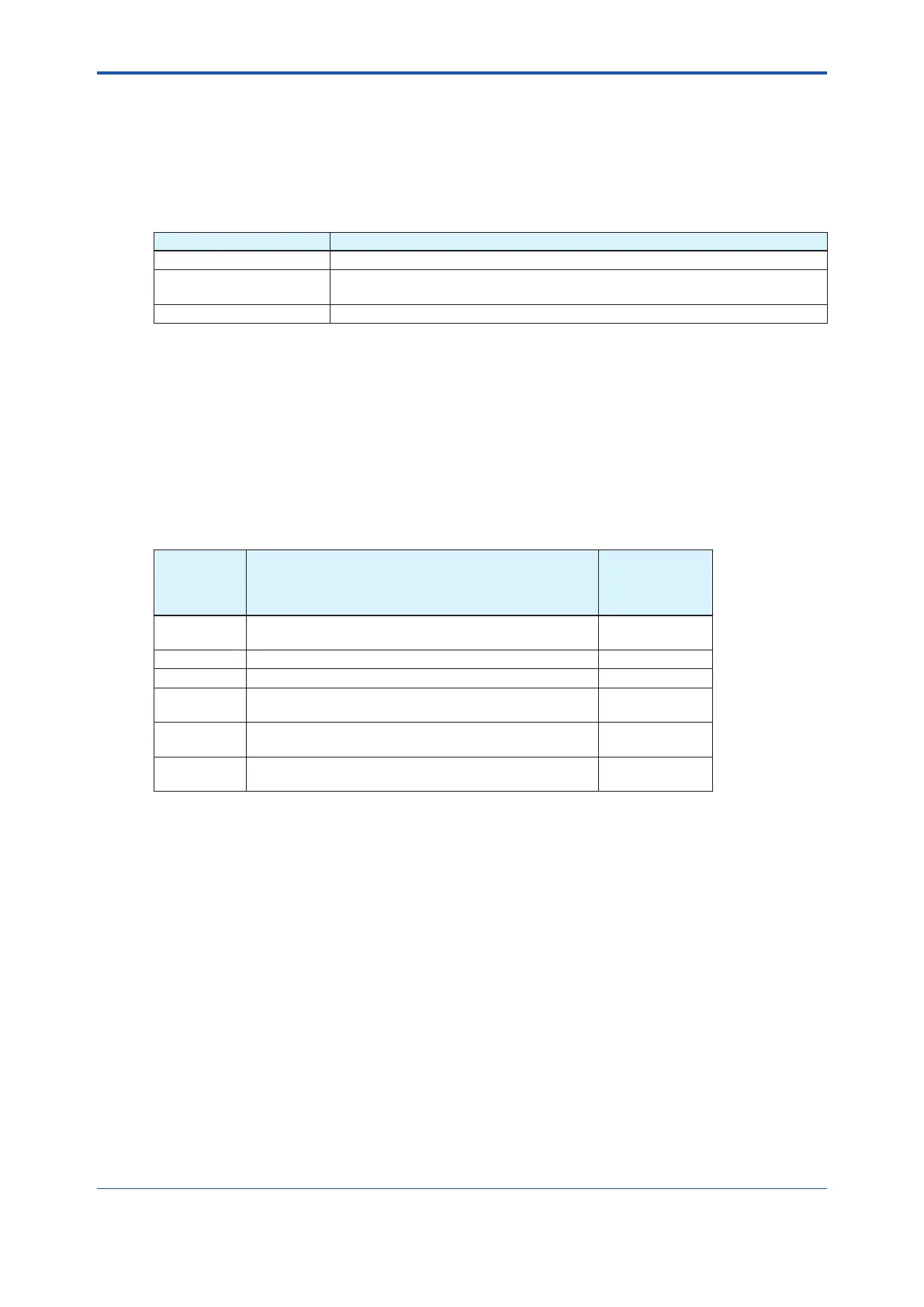
A5.18.2 Process Alarms
There are six types of process alarms. Only one process alarm can be generated at the same
time, and the process alarm having the highest priority level from among those occurring at the
same time is generated. To activate an alarm on communication, it is necessary to specify the
priority for alarm activation in advance. To activate an alarm, set 3 or more. By sending with
priority information being added in a communication frame when the alarm is activated, for
example,thealarmisusedtoapplyaltertoignorevaluesbelowthespeciedpriorityonthe
host side.
The priority level should be set for each process alarm type.
Parameter
Name
Cause of Occurrence
Parameter
Containing
Priority Level
Setting
HI_HI_ALM
Occurs when the PV increases above the HI_HI_LIM
value.
HI_HI_PRI
HI_ALM Occurs when the PV increases above HI_LIM value. HI_PRI
LO_ALM Occurs when the PV decreases below the LO_LIM value. LO_PRI
LO_LO_ALM
Occurs when the PV decreases below the LO_LO_LIM
value.
LO_LO_LIM
DV_HI_ALM
Occurswhenthevalueof[PV-SP]increasesabovethe
DV_HI_LIM value.
DV_HI_PRI
DV_LO
Occurs when the value of PV - SP decreases below the
DV_LO_LIM value.
DV_LO_PRI

 Loading...
Loading...


