<Appendix 5. PID Block>
283
IM 01E21A02-03EN
A5.4.2 PID Control Algorithm Parameters
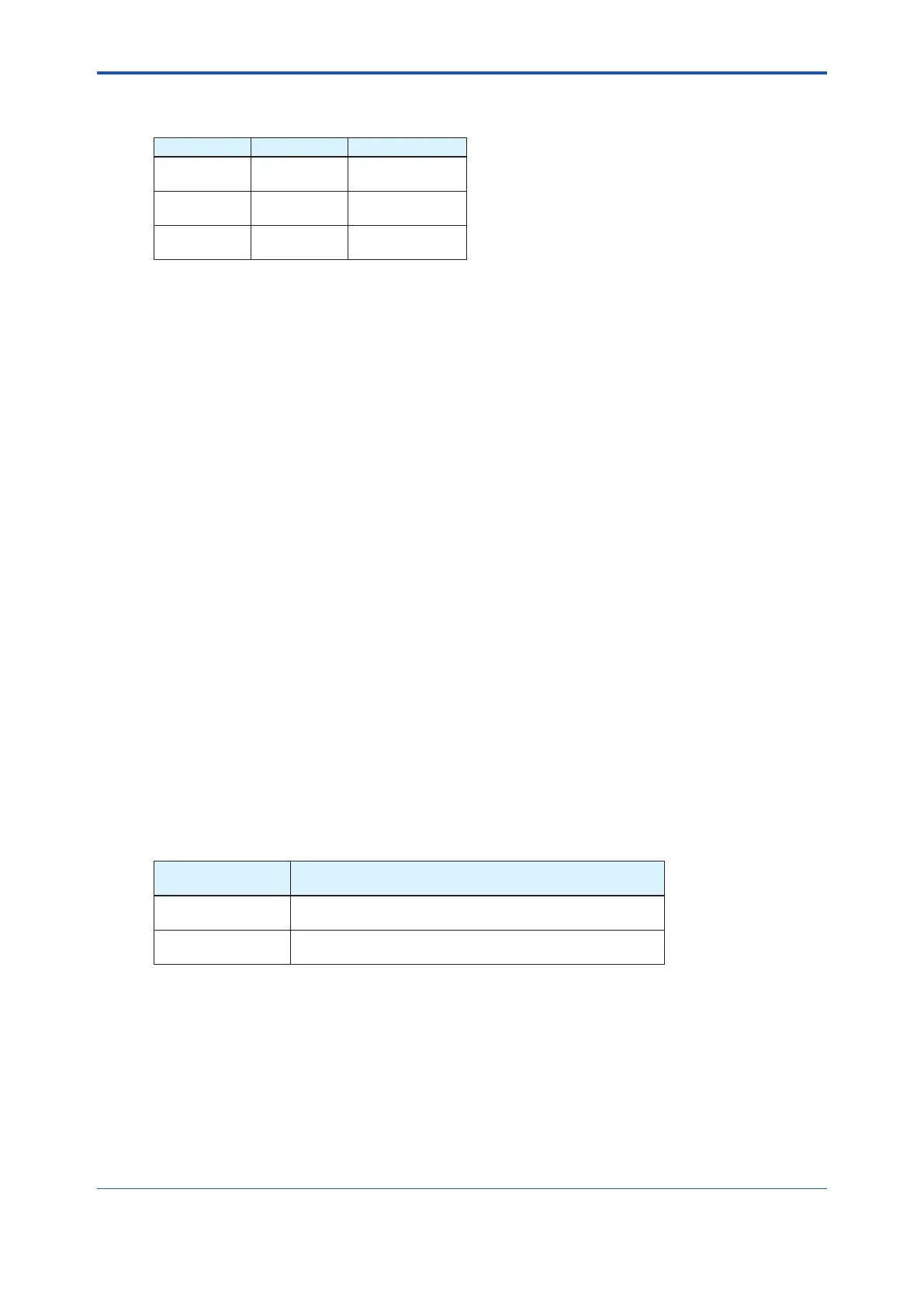
The table below shows setting parameters for the PID control algorithm.
Parameter Description Valid Range
GAIN
Proportional
gain
0.05 to 20
RESET Integral time
0.1 to 10000
(seconds)
RATE
Derivative
time
0toinnity
(seconds)
A5.5 Control Output Action
Thecontroloutputactionisthefunctiontoconvertthechangeinoperationoutput(ΔMVn)at
eachcontrolperiodtotheactualoperationoutputvalue(OUT).
ThecontroloutputactionforthePIDblockofEJXsupportsthevelocity-type.
A5.5.1 Velocity Type
ThePIDblockdeterminesthevalueofthenewcontroloutput(OUT)byaddingthechangein
controloutputcalculatedinthecurrentcontrolperiod(ΔMVn)tothevaluereadbackfromthe
outputdestination(BKCAL_IN).
The calculation expression for the control output action of speed type is shown below.
ΔMVn’=ΔMVn*(OUT_SCALE.EU100-OUT_SCALE.EU_0)/(PV_SCALE.
EU_100-PV_SCALE.EU_0)
(DirectActingisFalseinCONTROL_OPTS)
OUT=BKCAL_IN-ΔMVn’
(DirectActingisTrueinCONTROL_OPTS)
OUT=BKCAL_IN+ΔMVn’
A5.6 Direction of Control Action
The operating direction of the output is switched for the increase or decrease of the deviation.
ThedirectionisspeciedwithDirectActingofCONTROL_OPTS.
Value of Direct
Acting
Description
True
Theoutputincreaseswhenthemeasuredvalue(PV)is
greaterthanthesetpoint(SP).
False
Theoutputdecreaseswhenthemeasuredvalue(PV)is
greaterthanthesetpoint(SP).

 Loading...
Loading...


