<Appendix 5. PID Block>
285
IM 01E21A02-03EN
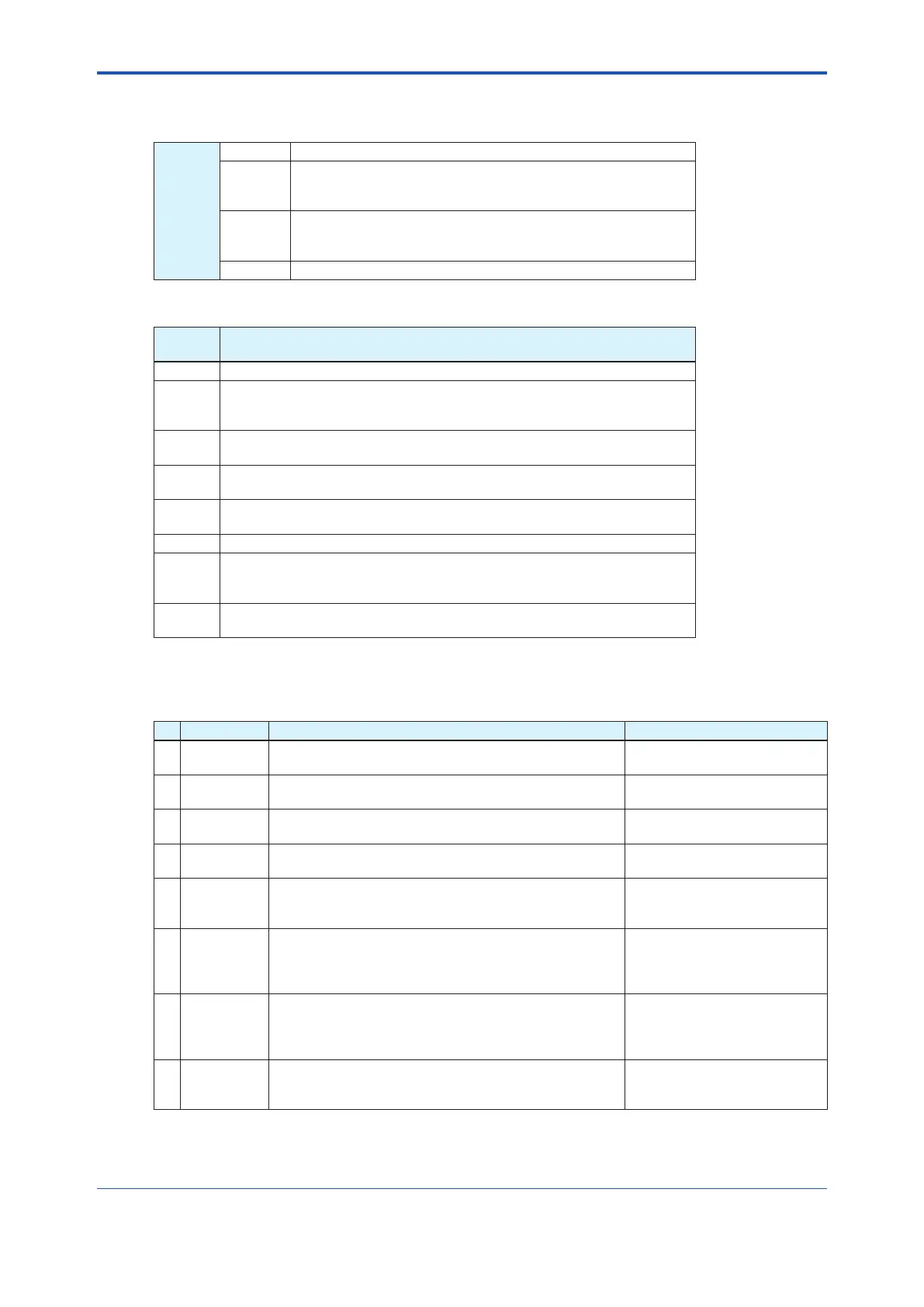
A5.9 Block Modes
TheblockmodeisdenedwiththeparameterMODE_BLK.
MODE_
BLK
Target Denesthetargetmode.
Actual
Indicates the current block mode.
Changes depending on the status of input data and target
contents.
Permitted
Denesconstraintsofthetargetmode.
Ifconstraintsarenotdenedhere,itbecomesimpossibleto
transition to the mode.
Normal Denesthenormalmode.
There are eight modes for the PID block as shown below.
Block
Mode
Description
ROut Remote output mode. The mode outputs the value given by ROUT_IN.
RCas
Bytheremotecascadeconnection,thesetpoint(SP)isreceivedfromthe
host computer, etc., and results of the PID control calculation processing are
output.
Cas
Bythecascadeconnection,thesetpoint(SP)isreceivedfromotherfunction
block, and results of the PID control calculation processing are output.
Auto
The PID block carries out automatic control and outputs the result calculated
by the PID control computation.
Man
The block goes into manual mode, and outputs OUT, the value set by the user
manually.
LO ThePIDblockoutputstheoperationoutputvaluesetinTRK_VAL.
IMan
Initialization and manual mode. This mode temporarily interrupts the control
operation. The mode which operates when the initialization and manual
fallback conditions shown in Section A5.14 are met.
O/S
Control calculation processing is carried out. The output of the previous value
is kept.
A5.9.1 Mode Transitions
Destination Condition Other Condition
(1) O/S
IfO/SisspeciedinMODE_BLK.target
(orifO/Sissetintargetinsidetheresourceblock)
(2) IMan
If the Initialization and manual fallback conditions are met
(SectionA5.14)
NOTifcondition(1)ismet
(3) LO
IfTrackEnableisspeciedinCONTROL_OPTSandthe
valueofTRK_IN_Distrue
NOT if either or both of
conditions(1)and(2)aremet
(4) Man
IfMANisspeciedinMODE_BLK.targetorifIN.status
(inputstatus)isBAD
NOT if any one or more of
conditions(1)to(3)aremet
(5) Auto
IfAutoisspeciedinMODE_BLK.target
- AND -
ifIN.status(inputstatus)isotherthanBAD
NOT if any one or more of
conditions(1)to(3)aremet
(6) Cas
IfCasisspeciedinMODE_BLK.target
- AND -
ifIN.Status(inputstatus)andCAS_IN.Statusareother
than BAD
NOT if any one or more of
conditions(1)to(3)aremet
(7) RCas
IfRCasisspeciedinMODE_BLK.target
- AND -
ifIN.Status(inputstatus)andRCAS_IN.Statusareother
than BAD
NOT if any one or more of
conditions(1)to(3)aremet
(8) ROut
IfROutisspeciedinMODE_BLK.target
- AND -
ifROUT_IN.status(inputstatus)isotherthanBAD
NOT if any one or more of
conditions(1)to(3)aremet
Note 1: To activate mode transitions to Auto, Cas, RCas, and ROut, the respective target modes
mustbepermittedbeforehandwithMODE_BLK.permitted.

 Loading...
Loading...


