Description of the Software Modules and Parameters
Parameter manual b maXX BM5800
Document No.: 5.16029.03
401
of 814
3
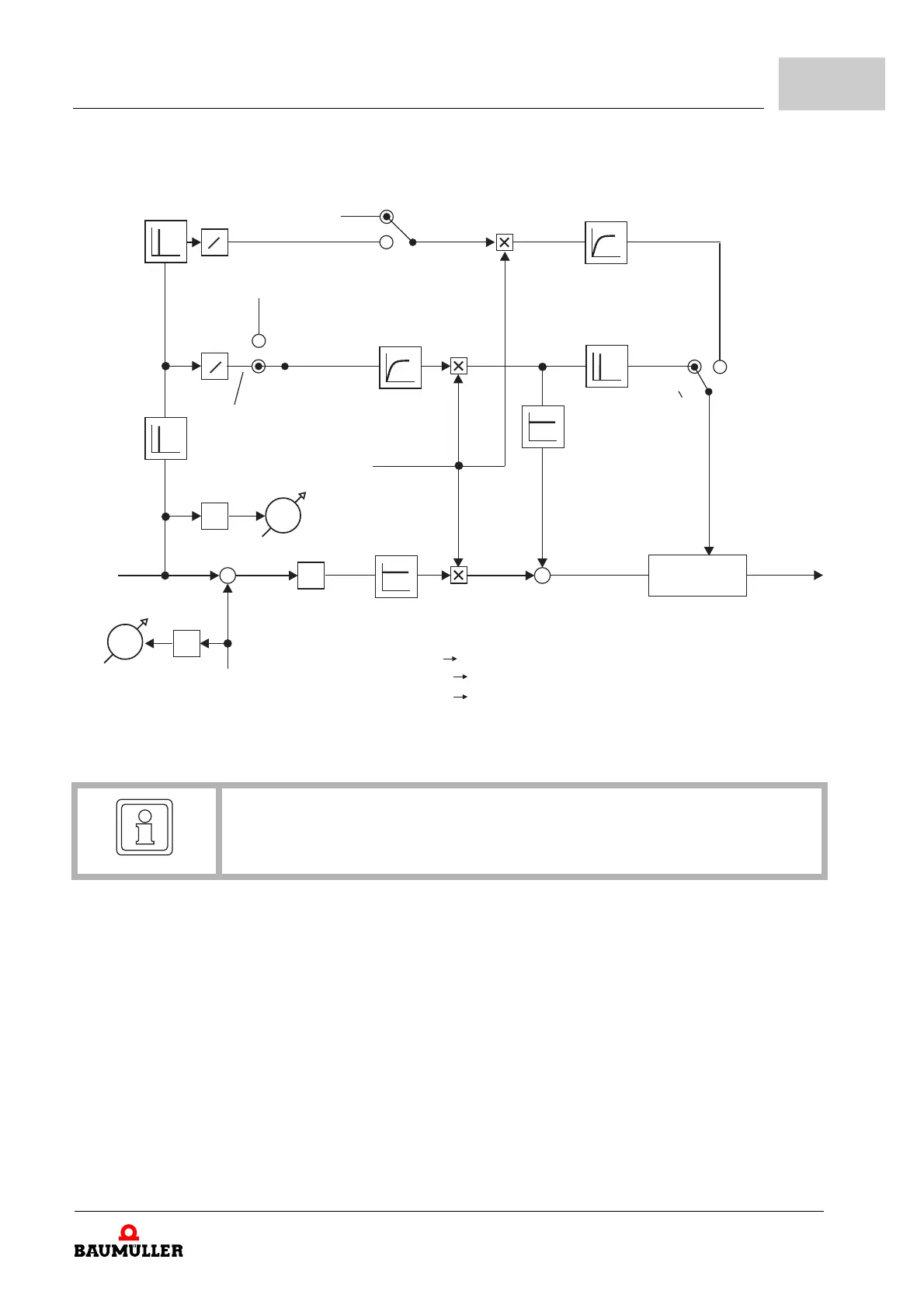
Figure 97: Block diagram of the position controller
5000_0084_rev09.cdr
Kv (18.14)
*
*
*
*
-
(18.13)
(18.62:18.61)
18.11
18.12
(111.7)
(18.16)
(18.70)
*
S
*
:/s
2
*
S
2
*
/s
: Inc
Inc/s
Inc/s
(18.39)
x1 position
actual value
External speed feedforward
External acceleration
feedforward (111.8)
Smoothing time
Position
set value
(18.59:18.58)
Position actual value
(18.56:18.55)
Position
controller
output
(18.31)
e1
Position
eror value
w1 position
set value
Position
error
Feedforward
factor
(18.15)
w2 speed feedfwd.
act. value
(18.17)
(18.9 bit2=1
and 109.2 = -4)
or
bit 16 = 1
Controller options (18.9) bit 16 = 1, bit2=0and
not position control 109.2 - 4operating mode
Gear factor
Position
controller
Position controller
output total
(18.51)
Speed contoller
w3 acceleration
feedfwd. from
position controller
(18.52)
Isq set value
unlimited
(18.45)
Degree
Operating mode
position control
109.2 = -4 and
controller options
18.9 bit3=1
109.2 -4 or
18.9 bit3=0
(18.9 bit2=0
or 109.2 = -4)
and
bit 16 = 0
Conversion:
: Degree/s
2
Degree/s
Smoothing time
Controller options (18.9) bit2=1 nd
operating mode position control 109.2=-4
a
Speed set value
output
SetValMgr
(18.69)
NOTE!
The gear factor Z18.16– is active at single axis and mono devices with two encoder
inputs only. The gear factor is not evaluated at double axis units.