Description of the Software Modules and Parameters
Parameter manual b maXX BM5800
Document No.: 5.16029.03
183
of 814
3
3.4.7.3 Description of the Parameters
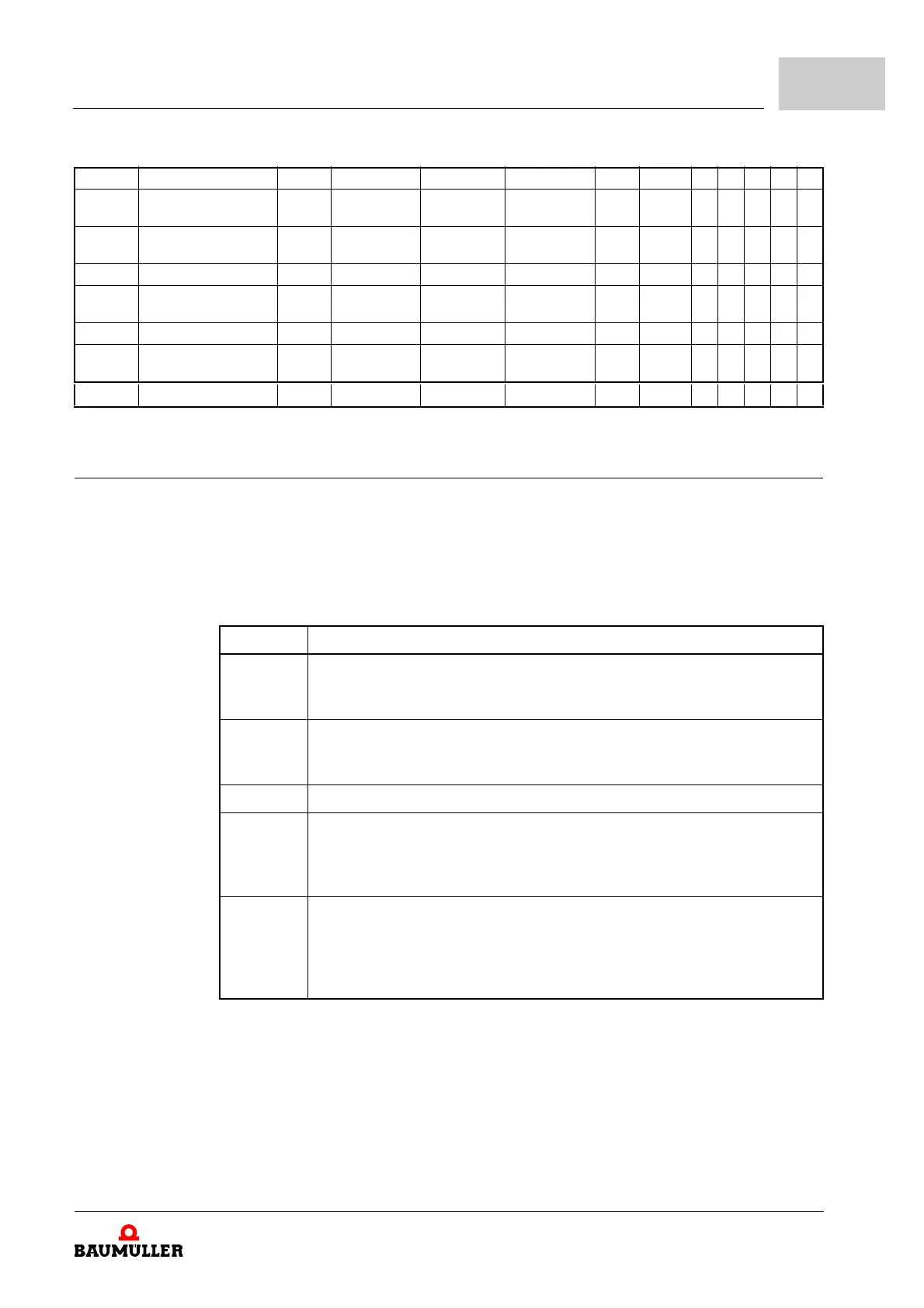
123.1 Mode
The contents of the identification can be set with this parameter.
To bit 3: Mode of the adaption of the dead time compensation after the PWM frequency:
– If the adaption is requested, the bit must be set before the measurement and then
must remain the same.
– If the bit is changed, the dead time voltage measurement must be repeated.
– If the adaption is activated, the dead time measurement values are converted to val-
ues corresponding to a PWM frequency of 8 kHz and subsequently stored in the
dead time correction table
Z123.15–. The effective dead time voltage for the dead
123.7 Inductance measured FLOAT 0.0 10000 6.4 mH 1:1 X
123.8 Result current controller
Kp
FLOAT 0.0 1000 0.0 V/A 1:1 X
123.9 Result current controller
Tn
FLOAT 0.0 1000 0.0 ms 1:1 X
123.10 Parameters takeover DINT 0 15 0 1:1 X
123.12 Time constant of step
response
FLOAT 0 10000 0 ms 1:1 X
123.14 Normalized Error FLOAT 0 100 0 % 1:1 X
123.15 Dead time compensa-
tion table
FLOAT -100 100 0 V 1:1 X
123.35 Result Rr FLOAT 0 100 0 Ohm 1:1 X
Bit Meaning
0 Mode motor resistance and inductance measurement
0: No measurement
1: Measurement
1 Mode dead time measurement
0: No measurement
1: Measurement
2 Reserved
3 Mode of the adaption of the dead time compensation after the PWM fre-
quency:
0: Not activated
1: Activated
4 Motor diagnosis:
0: Not activated
1: Activated
The motor diagnosis will be initiated if only bit 4 is activated and all other
bits were deactivated.