Description of the Software Modules and Parameters
Parameter manual b maXX BM5800
Document No.: 5.16029.03
463
of 814
3
ing the value 0 in Z107.20– Ke factor. The actual Ke factor of the machine must be en-
tered in Z107.20– for a correct feedforward of the electromagnetic force.
IxR feedforward
The IxR feedforward compensates the voltage drop at the ohmic resistance of the stator
winding for both the field forming and the torque forming current controller. This feedfor
-
ward is generally deactivated and can be activated via parameter Z47.51–, if required.
Additionally it is possible to execute the feedforward based on the actual current values
or based on the current set values. This must be also set in parameter
Z47.51–.
For the used stator resistance the decisive factor can be either the parameter value
Z107.29– (Motor data) or the parameter value Z123.6– (measured resistance). It de-
pends on the parameterization of parameter Z123.10–.
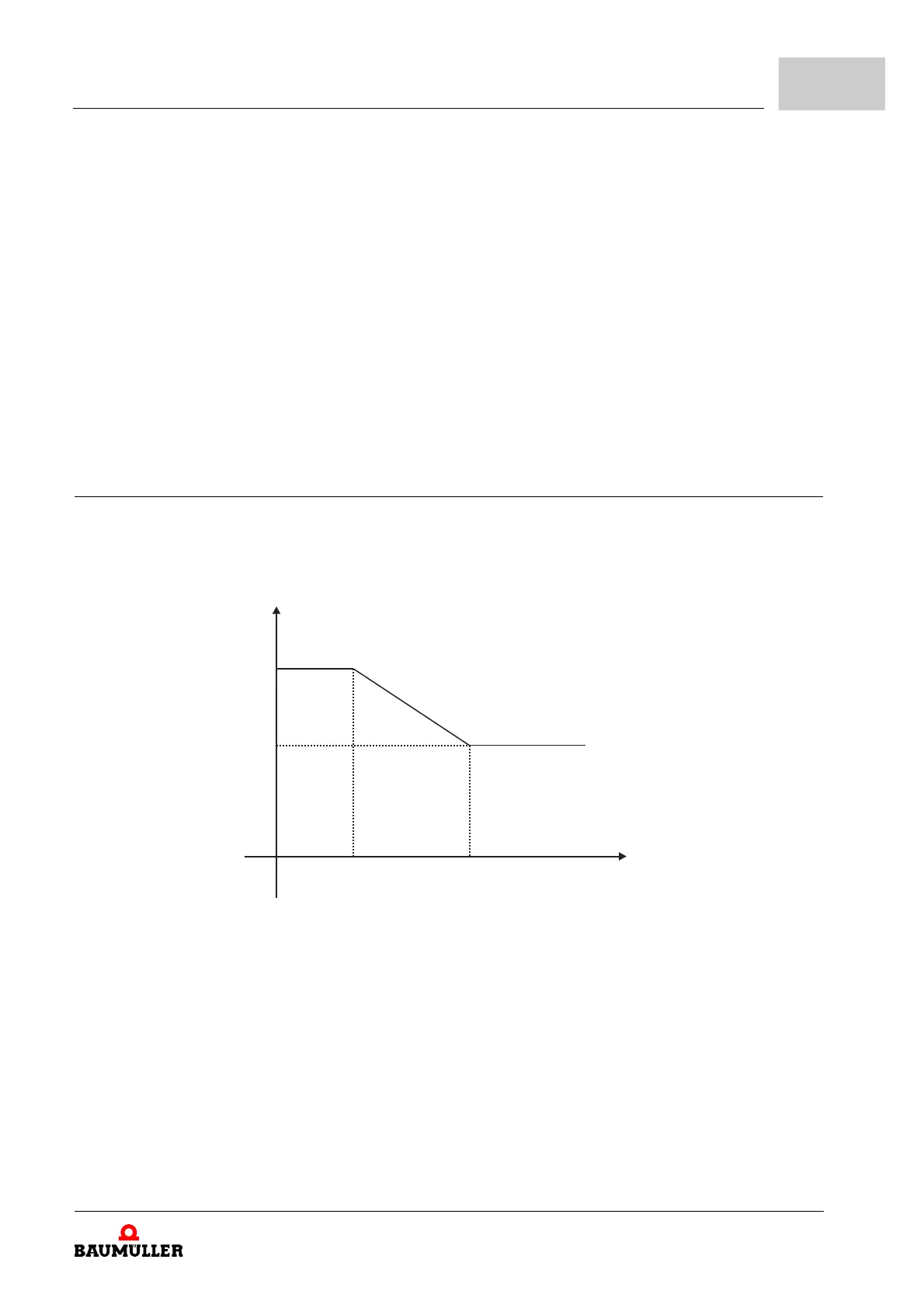
3.7.3.5 Current controller adaption
Adaption of the current controller that can be programmed freely.
The current controller may become instable at motors with strong saturation. The current
controller adaption can be used to reach a constant control also at high currents.
Figure 121: Current controller adaption
The P-gain for the Iq- and Id controller is reduced from the lower adaption threshold for
the current controller
Z155.11– up to the upper adaption threshold Z155.12–. There the
P-gain reaches a limited percentage Kp
Adapt
Z155.13– of the original P-gain. The adap-
tion results from the current set value Z47.1–.
The current controller adaption can be activated by (controller adaption) mode Z155.1–.
Kp [%]
Iq [A]
Iq
2
Iq
1
Kp
Adapt
100%
5000_0229_rev01_int.cdr