Description of the Software Modules and Parameters
Parameter manual b maXX BM5800
Document No.: 5.16029.03
441
of 814
3
3.7.2 Filter of the torque current set value
The torque current set value is available of a PT
1
filter, a notch filter and a freely param-
eterizable polynomial filter.
3.7.2.1 PT
1
filter and notch filter
The PT
1
filter can be set by the corner frequency parameter (Z19.12–). The notch filter
is set by the blocking frequency (Z138.12–) and the bandwidth (Z138.13–).
3.7.2.2 Polynomial filter
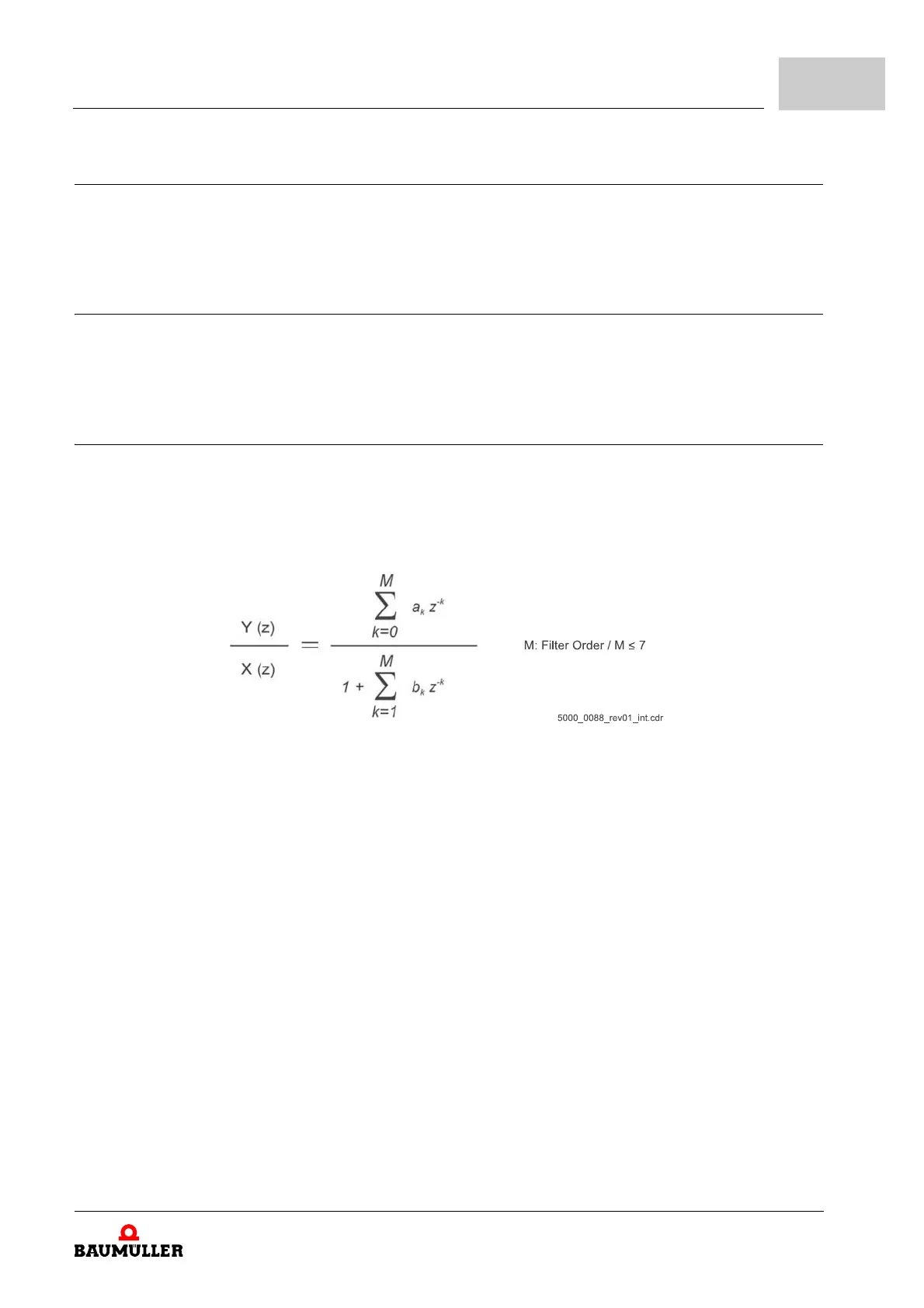
The polynomial filter contains a general digital IIR filter function (IIR = Infinite Impulse Re-
sponse) which is typically used as an actuating variable filter (Isq-set-filter). The order
(
Z29.8–) of the filter (maximum 7) and the filter coefficients (Z29.9– to Z29.23–) can be
freely set as parameters. The transfer function in the z-domain is:
Figure 111: Equation for filter order
where the z
-k
are the lag elements about the k-cycle.
The polynomial filter works at the axis units between the speed controller and the current
controller and at the active mains rectifier unit between the DC link controller and the cur
-
rent controller as a torque current set value filter. It can be switched on and off using the
Module command (
Z29.1–).
The polynomial filter can be used at the axes at two positions - either after the torque cur-
rent set value limit or directly after the speed PI controller output. The difference is, that
with the last-mentioned, the acceleration feedforward, the Isq additional set value
(
Z19.17–) and the operation mode current control of the Isq set value Z18.50– or torque
set value Z18.78– are not filtered. At the active mains inverter the polynomial filter always
is active after the current limits.
Via Z29.1– bits 0, 1 the polynomial filter either can be activated after the torque current
set value limit or directly after the speed PI controller or it can be completely deactivated.
The polynomial filter is set by the individual filter coefficients. Hereby there are two op-
tions:
m The filter coefficients can be set individually via the parameters (Z29.9– to Z29.23–)
m The filter coefficients can be calculated by the filter parameters (Z29.30– to
Z29.51–). Hereby bit 2 of Z29.1– must be active. Via the bit 3 the filter coefficients
are calculated again.