19. Navigation Sensors
19-14
19.8.1 Filter and automatic route steering
The filter can operate based on only one position sensor and one gyro. However, this minimum selection is not
suitable for automatic route steering or program track, which both require an independent speed source. With
automatic route steering, the minimum selection is for GOTO WPT:
• One position sensor, gyro and log or
• Two position sensors and gyro
• And for GOTO Track:
• One high-precision position sensor, gyro and log or
• One high-precision position sensor, secondary position sensors and gyro
Source of position indicates what kind of sensors the filter is using for position calculation. The permanent
indication is shown at the top right hand corner:
• FILTER: There is no high-precision position sensor selected and available for the filter.
• FILTER HIGH: There is a high-precision position sensor selected and available for the filter. It is possible to
use track steering modes that require accurate position (GOTO Track, Program Track).
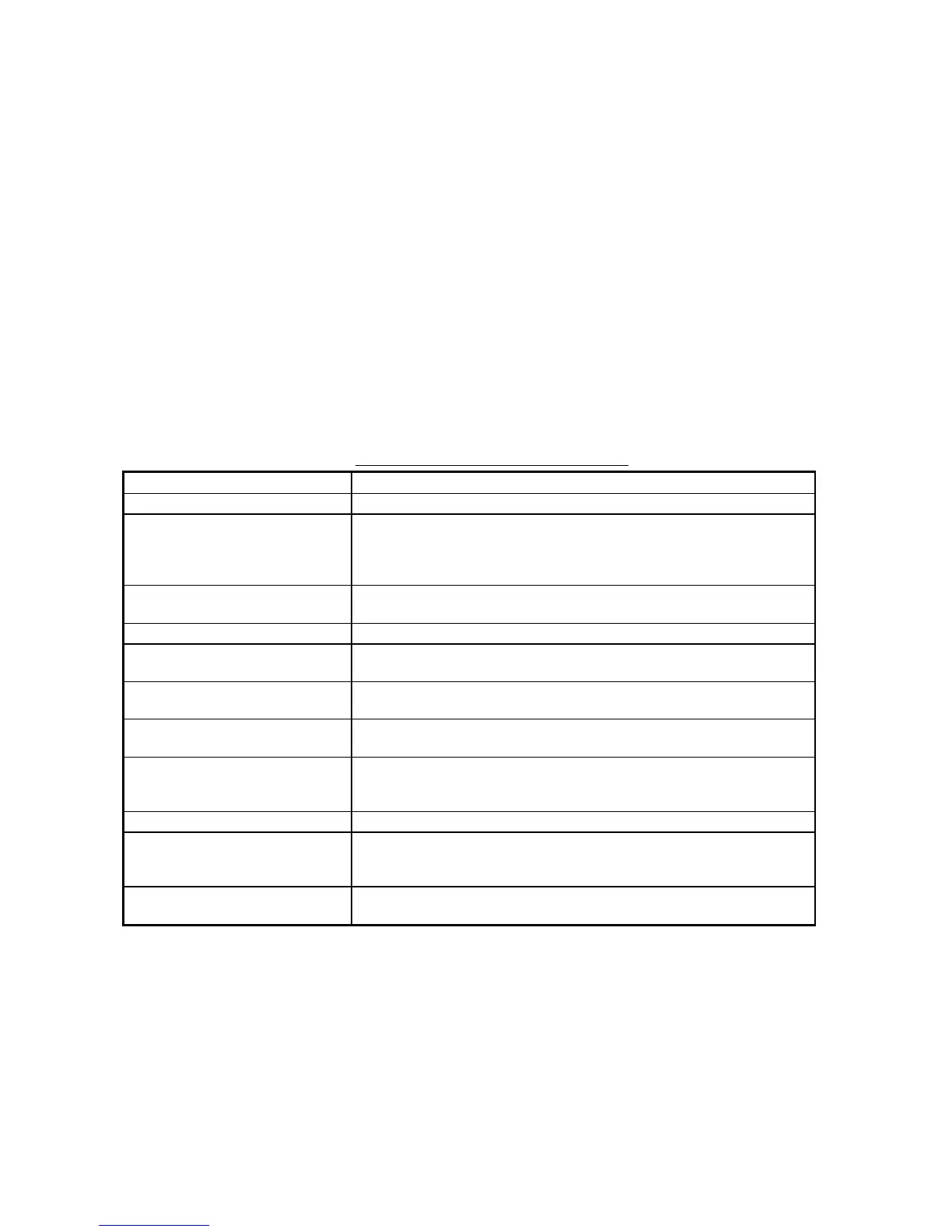
Filter state, automatic route steering and alert
Filter state, automatic route steering and alert
Alert Meaning
400 Filter: POSN unreliable The filter is not able to calculate the position from the connected sensors.
406 Route: CRS jump possible
Generated after alert 400 is displayed. It reminds you that if you want to
continue automatic route steering you need to select one of the position
sensors. Then, most probably your ship will perform a turn as a
consequence of next WPT position.
470 Disabled: Needs filter on
You tried to enable automatic route steering without Kalman filter
positioning.
475 Route: Needs filter ON Filter is lost during automatic route steering.
476 Route: Needs log sensor
Log device is lost during automatic route steering and your remaining log
selection doesn’t meet minimum requirements.
490 Disabled: Needs log sensor
You tried to enable automatic route steering without an independent speed
source.
491 Disabled: Needs diff pos.
You tried to enable automatic route steering for GOTO Track mode
without a high-precision sensor.
492 Route: Needs diff pos.
You lost a high-precision sensor in automatic steering, GOTO Track
mode, and remaining sensor doesn’t meet the minimum requirements for
high-precision sensor.
493 ProgTrack: Needs Filter ON You lost the Kalman filter position during program track.
494 ProgTrack: Needs diff pos.
You lost a high-precision position sensor during program track and
remaining sensor doesn’t meet the minimum requirements for high-
precision sensor remaining selection doesn't meet the minimum.
495 ProgTrack: Needs log sensor
You lost a log device during program track and your remaining log
devices selections don’t meet the minimum requirements.
About alert "400 Filter: POSN unreliable"
If the filter is used with automatic route steering then, in case of alert "400 Filter: POSN unreliable", all position
sensors and the filter itself are switched OFF and the system continues with backup dead reckoning, based on
selected speed/course sensors. In this case it is recommended that you leave automatic route steering and continue
using a more traditional steering mode until you find the reason why alert 400 was generated. If you don't leave
automatic route steering, the system will repeat alert "475 Route: Needs filter ON" every 15 seconds.
After the alert 400 is generated, the operator should leave automatic route steering and evaluate which sensor caused
the problem. If the ship position from a position sensor is acceptable, switch it on. Don't select any sensor that
causes jumping. Then, you can turn the filter ON again and continue automatic route steering.