11 System bus "CAN on board"
11.11 CANopen objects implemented | I-1403
768
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
I-1403
From version 15.00.00
Communication parameter for receiving process data via RPDO4
• For data telegram assignment and description of subindices 1 and 2, see object I-1400
.
How to change the identifier:
1. Deactivate identifier (set bit 31 to "1").
2. Change identifier.
3. Activate identifier (set bit 31 to "0").
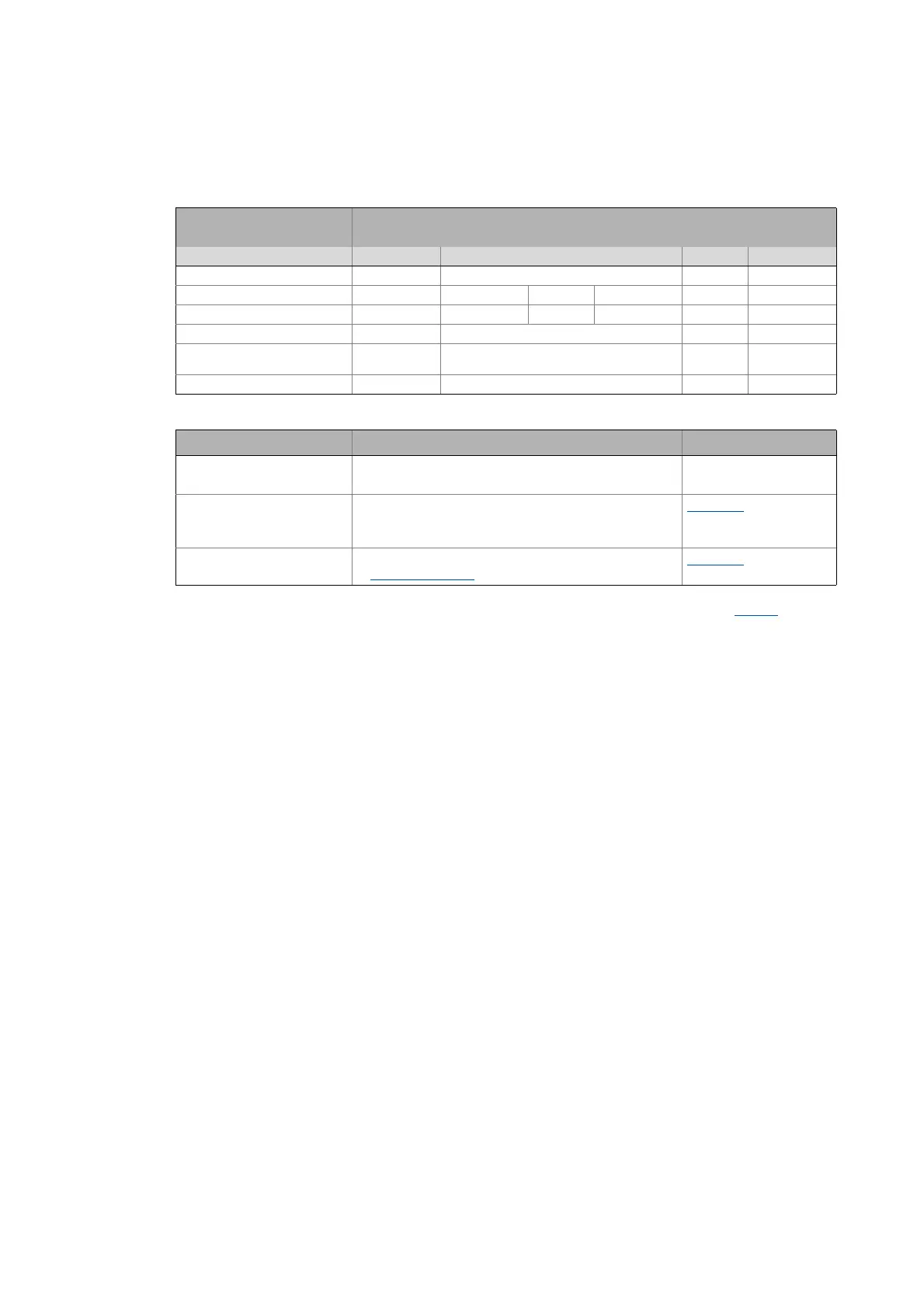
Index:
I-1403
Name:
RPDO4 communication parameter
Subindex Default setting Setting range (min. value | unit | max. value) Access Data type
0: Highest subindex supported 5 - (read access only) ro U8
1: COB-ID used by RPDO 0x500 + node ID 0 4294967295 rw U32
2: Transmission type 254 0 255 rw U8
3: Inhibit time - - (not used for RPDOs) rw U16
4: Compatibility entry - - (reserved, read or write access leads to error message
0x06090011)
rw U8
5: Event timer - - (not used for RPDOs) rw U16
Subindex Meaning Code
0 "5" is permanently set.
• Max. 5 subindices are supported.
-
1 Identifier RPDO4
• According to the "Predefined Connection Set", the
basic setting is: Identifier = 0x500 + node ID
C00354/7
2 RPDO transmission type according to DS301 V4.02
Transmission type
( 731)
C00323/4