Setting up Compax3
C3I10T10
192-120100 N16 C3I10T10 - December 2010
Simulated Encoder Output Resolution
Unit: Increments per
revolution / pitch
Range: 4 - 16384 Standard value: 1024
Any resolution can be set
Limit frequency: 620kHz (track A or B) i.e. , with:
Increments per revolution max. Velocity
1024 36000 rpm
4096 9000 rpm
16384 2250 rpm
Invert Motor Rotation/Direction Polarity
Unit: - Range: no / yes Standard value: no
Reverse direction inverts the sense of rotation, i.e. the direction of movement of the motor
is reversed in the case of equal setpoint.
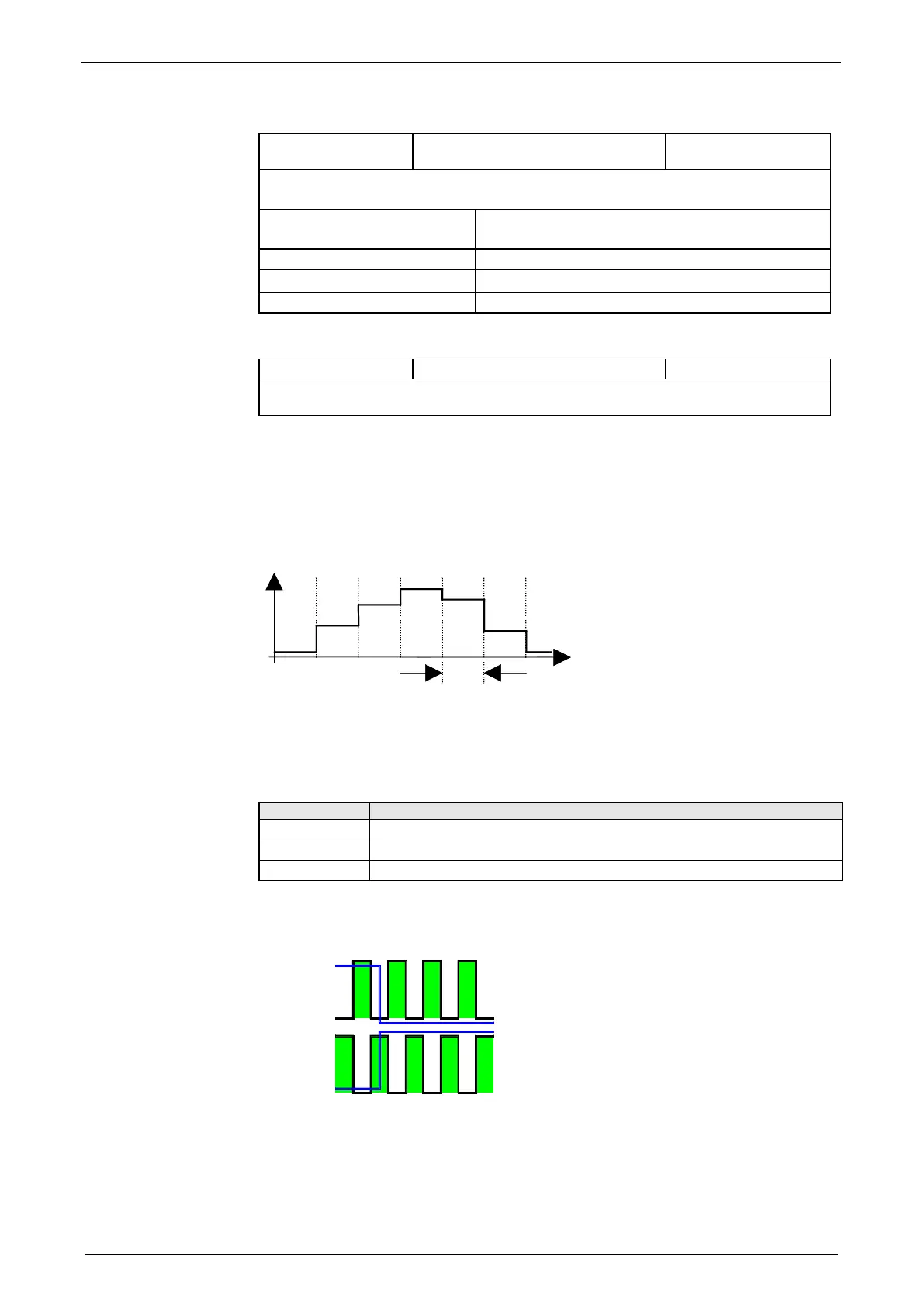
Time frame predefined setpoint value
Averaging and a following filter (interpolation) can help to avoid steps caused by
discrete signals.
If the external signal is analog, there is no need to enter a value here (Value = 0).
For discrete signals e.g. from a PLC, the scanning time (or cycle time) of the signal
source is entered.
This function is only available if the analog interface +/-10V is used!
4.1.7.2 Step/Direction Input 24V
Required wiring:
X12/13 Step
X12/14 Direction
X12/15 0V
4.1.7.3 Step/Direction Input RS422
Input:

 Loading...
Loading...






