Parker EME
Setting up Compax3
192-120100 N16 C3I10T10 - December 2010
Keep position via I4
With I4 = “1” position setpoint = 0 is predefined.
External forces can be compensated via corresponding motor moments.
If the motor is shifted from its position by too high external forces (current limit is
reached), the drive moves to its original position (after the reduction of the external
forces).
Current at setpoint +10V
Setting values:
Unit: mA Range: +/-0... I(max) Standard value: I(nom)
Define reference system 10V = current; I(nom)= Nominal current of the motor.
I(max): is the smaller value from motor peak current and device peak current
Simulated Encoder Output Resolution
Unit: Increments per
revolution / pitch
Range: 4 - 16384 Standard value: 1024
Any resolution can be set
Limit frequency: 620kHz (track A or B) i.e. , with:
Increments per revolution max. Velocity
1024 36000 rpm
4096 9000 rpm
16384 2250 rpm
Invert Motor Rotation/Direction Polarity
Unit: - Range: no / yes Standard value: no
Reverse direction inverts the sense of rotation, i.e. the direction of movement of the motor
is reversed in the case of equal setpoint.
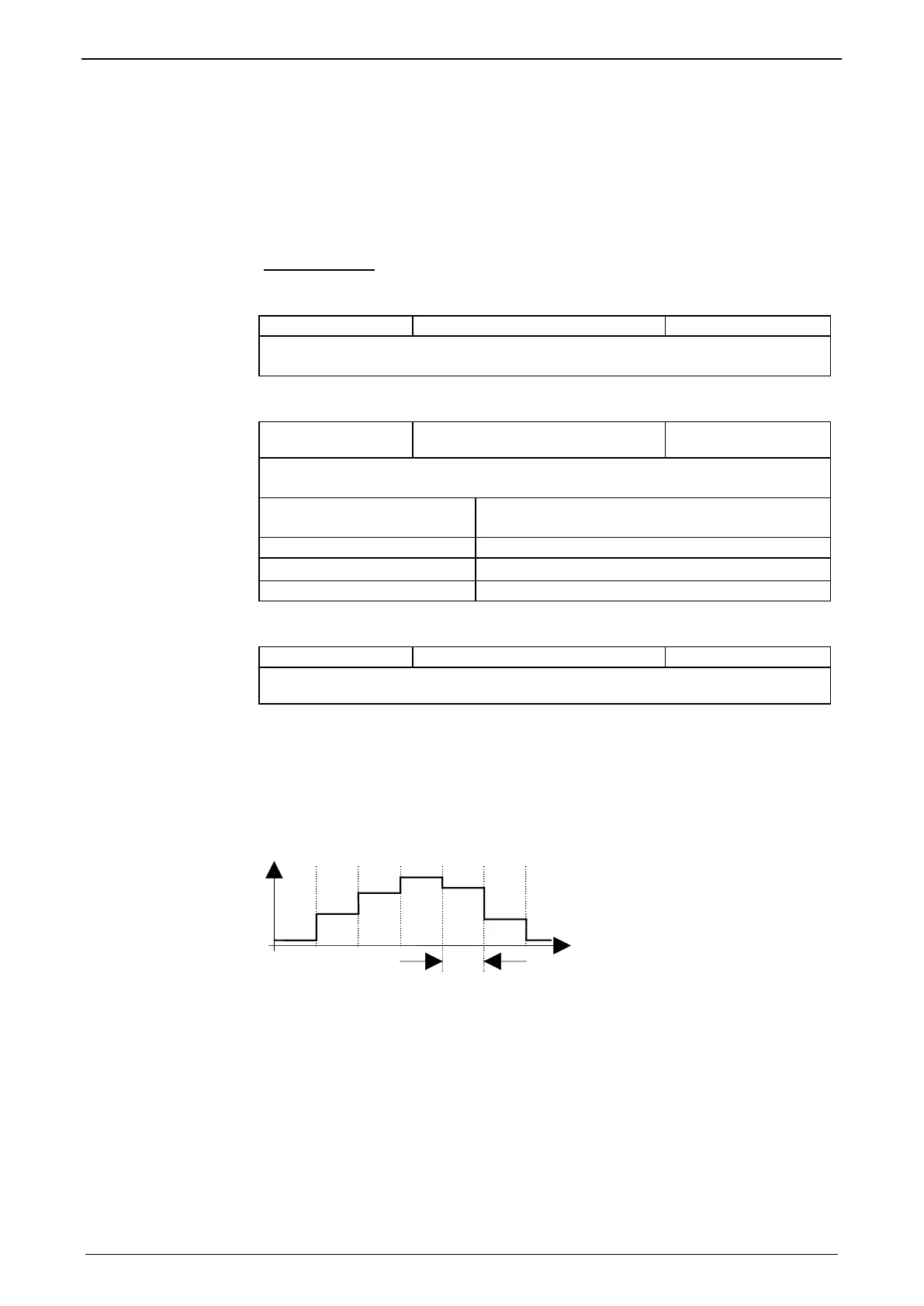
Time frame predefined setpoint value
Averaging and a following filter (interpolation) can help to avoid steps caused by
discrete signals.
If the external signal is analog, there is no need to enter a value here (Value = 0).
For discrete signals e.g. from a PLC, the scanning time (or cycle time) of the signal
source is entered.
This function is only available if the analog interface +/-10V is used!
4.1.8. Setpoint control
Servo-drive behavior after activating or deactivating the X12/6 "energize motor"
and X12/7 "setpoint value release" inputs can be set using ramps.
Ramps are not supported in the operating mode "±10V analogue current setpoint
value
 Loading...
Loading...







