Setting up Compax3
C3I10T10
192-120100 N16 C3I10T10 - December 2010
4.1.7.6 Encoder input 24V
The zero pulse is not evaluated!
Increments per motor revolution / pitch
Unit: Increments Range: Standard value: 1024
Number of steps per motor revolution / pitch
Invert Motor Rotation/Direction Polarity
Unit: - Range: no / yes Standard value: no
Reverse direction inverts the sense of rotation, i.e. the direction of movement of the motor
is reversed in the case of equal setpoint.
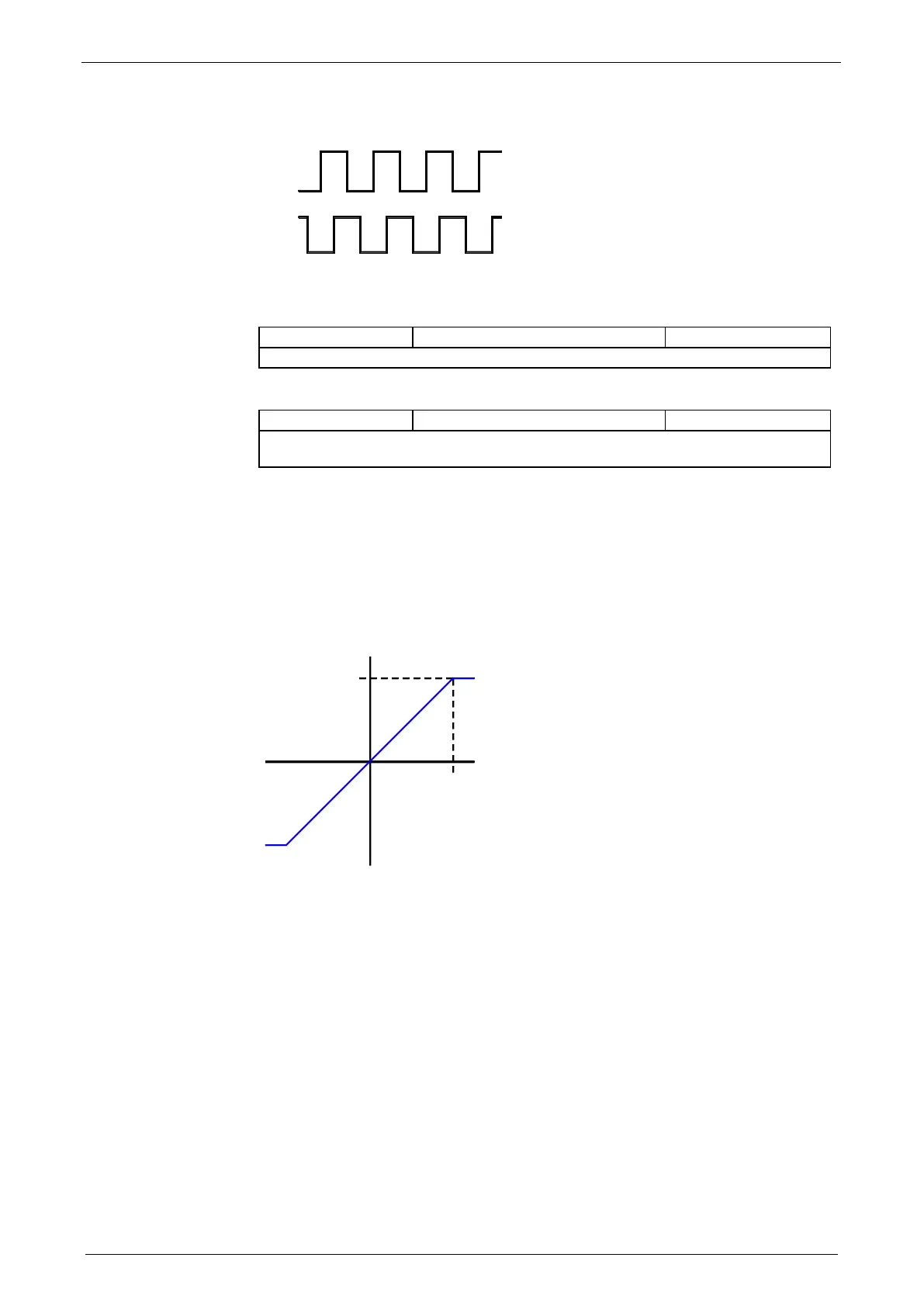
4.1.7.7 ±10V analog current setpoint commanding and
encoder emulation
Input:
±10V analogue;
14Bit resolution;
62.5µs scanning rate
10V
I
max
Holding function “keep Position / speed 0” via I4
The input I4 can be assigned with an additional function. You may choose
between:
without holding function I4
Keep rotational speed / velocity 0 via I4
Predefine speed setpoint value = 0 via I4 = “1”.
External forces can be compensated via corresponding motor moments.
The state “internal current setpoint” reflects the external forces.

 Loading...
Loading...






