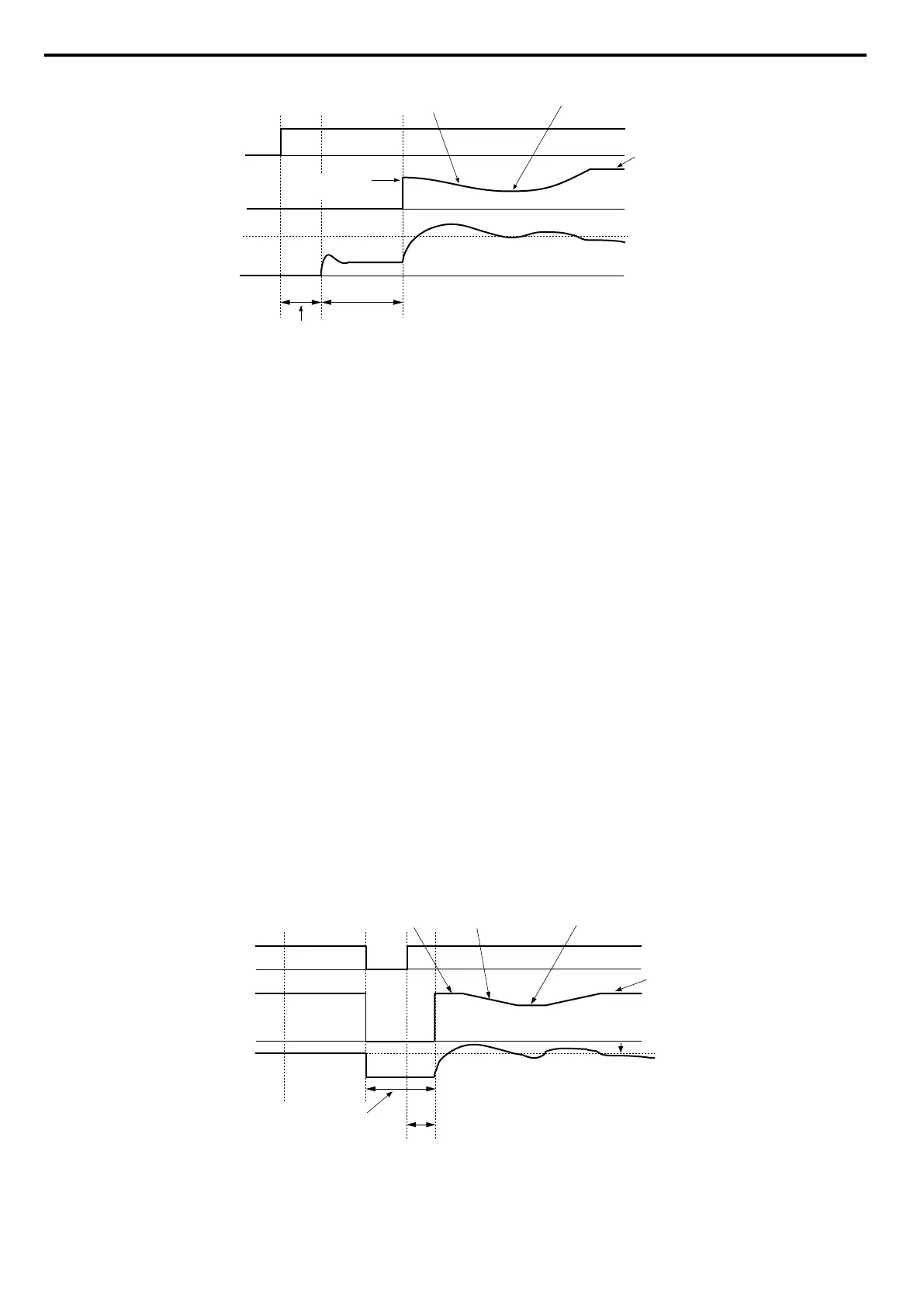
Run command
Output
frequency
Output
current
OFF
ON
b3-02
Starts at the speed
speed that was detected
Waits twice as long as L2-04
Frequency reference
set to the drive
Decelerates at the Speed
Search decel time set to b3-03
1.0 s
Min. Baseblock Time (L2-03) <1>
Figure 5.12 Speed Search at Start
<1> The wait time for Speed Search (b3-05) determines the lower limit.
Note: If the Run command is quickly switched off and then back on again when the drive is set to “Coast to stop” as the stopping method,
Speed Search will operate as shown in Figure 5.11.
Notes on Using Speed Estimation Type Speed Search
• Auto-Tuning needs to be first performed if you plan to use Speed Estimation. Perform Auto-Tuning again if the there
is a change in the cable length between the drive and motor.
• Use Current Detection to search for speeds beyond 130 Hz or if the application is running multiple motors from the same
drive, or if the motor is considerably smaller than the capacity of the drive.
• Speed Estimation may have trouble finding the actual speed if the motor cable very long. Current Detection should be
used in such situations.
• Use Current Detection instead of Speed Estimation when operating motors smaller than 1.5 kW. Speed Estimation can
end up stopping smaller motors as it might not be able to detect the speed or rotation direction of such small motors.
• Use Short circuit Braking instead of Speed Estimation when using Open Loop Vector Control for PM motors along with
a fairly long motor cable.
• Use Short circuit Braking instead of Speed Estimation if attempting to find the speed of a motor coasting faster than 120
Hz in Open Loop Vector Control for PM motors.
n
Current Detection Type Speed Search (b3-24 = 0)
Current Detection Speed Search can be applied to any motor. Be aware that sudden acceleration may occur when using
Current Detection with relatively light loads.
This method detects the motor speed by reducing the output frequency and measuring the current. The frequency reduction
starts from the maximum output frequency or from the set frequency reference. As long as the output frequency is higher
than the rotor speed, the slip will cause a high current. The closer the output frequency comes to the rotor speed, the lower
the current draw will be. When the output current drops below the level as set in b3-02, the output frequency stops
decreasing and normal operation resumes.
The following time chart illustrates how Current Detection Speed Search operates after a momentary power loss:
AC power
supply
Output
frequency
Output
current
OFFON
Output frequency before
momentary power loss
Selected
frequency
reference
Min. Baseblock Time (L2-03)
Decel time
set to b3-03
Waits for twice
as long as L2-04
Speed Search operation
current set to b3-02
b3-05
Figure 5.13 Current Detection Speed Search after Power Loss
Note: After power is restored, the drive waits until the time set to b3-05 has passed before performing Speed Search. Thereby the Speed
Search may start not at the end of L2-03 but even later.
5.2 b: Application
126
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual

 Loading...
Loading...















