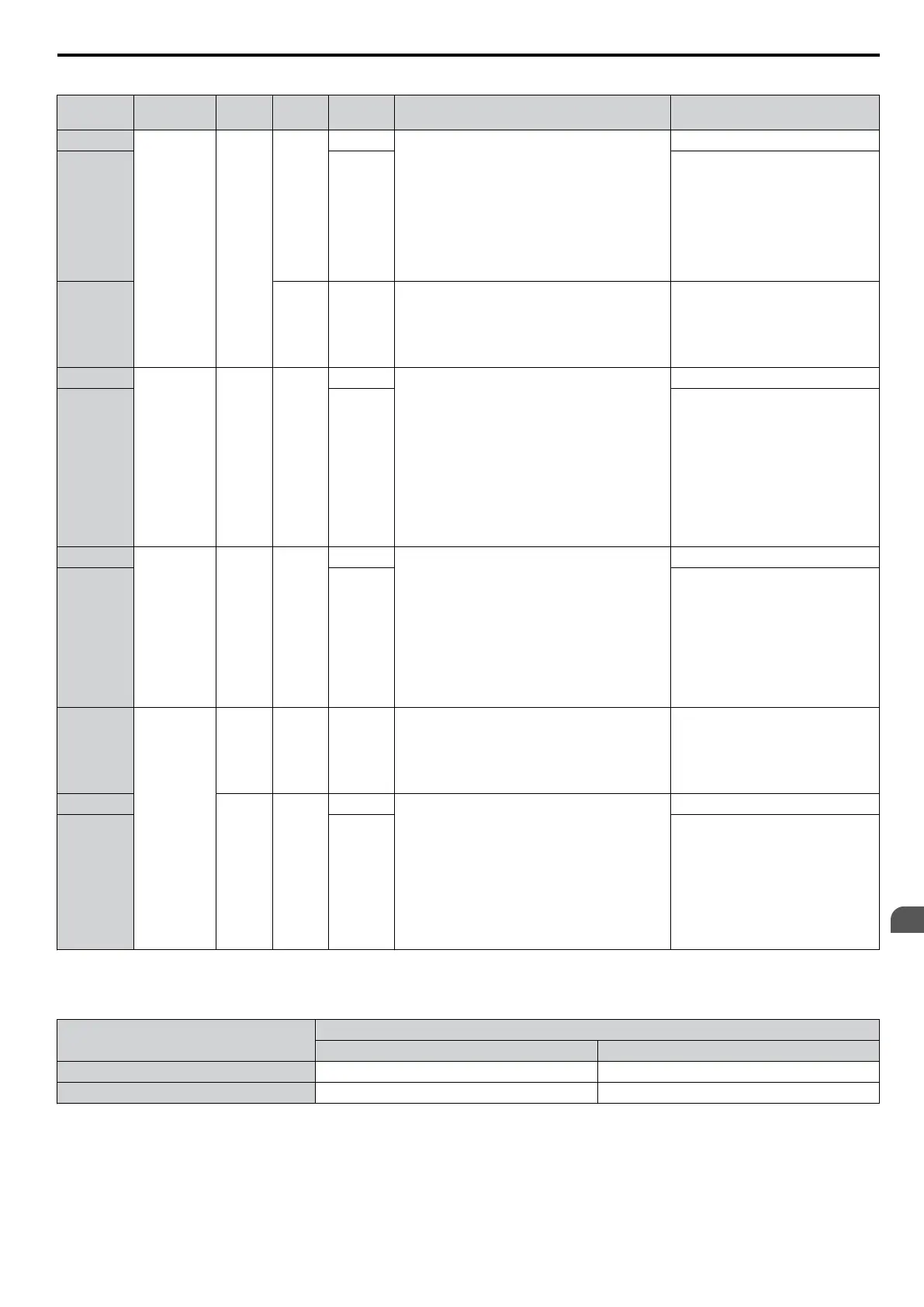
Table 5.26 Up/Down 2 Operations
Condition
Freq. Ref.
Source
d4-03 d4-05 d4-01 Operation Frequency Saved
1
Multi-Step
Speed
Reference
0
0
0 • Accelerates (increases the bias) while the Up
2 function is closed
• Decelerates (decreases the bias) while Down 2
is closed
• Holds output frequency (holds the bias) when
no Up 2 or Down 2 input or both active.
• Resets the bias when the reference changes
• Operates with the frequency reference in all
other situations.
Not saved
2 1
If the bias and frequency reference
are constant for 5 s, the bias is added
to the active frequency reference and
reset afterwards.
3 1 --
• Accelerates (increases the bias) while the Up
2 function is closed,
• Decelerates (decreases the bias) while Down 2
is closed.
• Otherwise operates at the frequency reference
Not saved
4
Multi-Step
Speed
Reference
Value
other
than 0
--
0 • When the Up 2 is enabled, drive accelerates up
to the frequency reference plus d4-03 (bias is
increased for d4-03).
• When Down 2 is enabled, drive decelerates
down to the frequency reference minus d4-03
(bias is decreased for d4-03).
• Holds output frequency (holds the bias) when
no Up 2 or Down 2 input or both active.
• Resets the bias when the reference changes
• Operates with the frequency reference in all
other situations.
Not saved
5 1
If the bias and frequency reference
are constant for 5 s, the bias is added
to the active frequency reference and
reset afterwards.
6
Other
(analog
communicati
ons, etc.)
0 0
0 • Accelerates (increases the bias) while the Up
2 function is closed
• Decelerates (decreases the bias) while Down 2
is closed
• Holds output frequency (holds the bias) when
no Up 2 or Down 2 input or both active.
• When during accel/decel. the frequency
reference changes for more than d4-07, bias
value is held until the output frequency meets
the reference (speed agree).
Not saved
7 1
If the bias is constant for 5 s, it is
saved to parameter d4-06. The
frequency reference cannot be
overwritten, so only the bias is
saved.
8
Other
(analog
communicati
ons, etc.)
0 1 --
• Accelerates (increases the bias) while the Up
2 function is closed,
• Decelerates (decreases the bias) while Down 2
is closed.
• Otherwise operates at the frequency reference
Not saved
9
Value
other
than 0
--
0 • When the Up 2 is enabled, drive accelerates up
to the frequency reference plus d4-03
(increases the bias for d4-03).
• When Down 2 is enabled, drive decelerates
down to the frequency reference minus d4-03
(decreases the bias for d4-03).
• When during accel/decel the frequency
reference changes for more then d4-07, bias
value is held until the output frequency meets
the reference (speed agree).
Not saved
10 1
If the bias is constant for 5 s, it is
saved to parameter d4-06. The
frequency reference cannot be
overwritten, so only the bias is
saved.
Setting 7A/7B: KEB Ride-Thru 2 (N.C./N.O.)
A digital input programmed for this function can be used to activate the KEB 2 function and detect power supply return.
Description
Digital Inputs
Setting 7A (N.C.) Setting 7B (N.O.)
KEB 2 deceleration Open Closed
Normal operation Closed Open
Refer to Kinetic Energy Backup (KEB) Function on page 208 for details on how to use these input settings.
Setting 7C/7D: Short Circuit Braking (N.O./N.C.) (OLV/PM only)
An input programmed for this function can be
used to activate Short Circuit Braking in Open Loop Vector Control for PM
motors. By linking all three phases of a PM motor it creates a braking torque in a rotating motor and can be used to stop
a rotating motor or prevent a motor from coasting by external forces (like windmill effect in fan applications etc.).
5.7 H: Terminal Functions
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual
185
5
Parameter Details

 Loading...
Loading...















