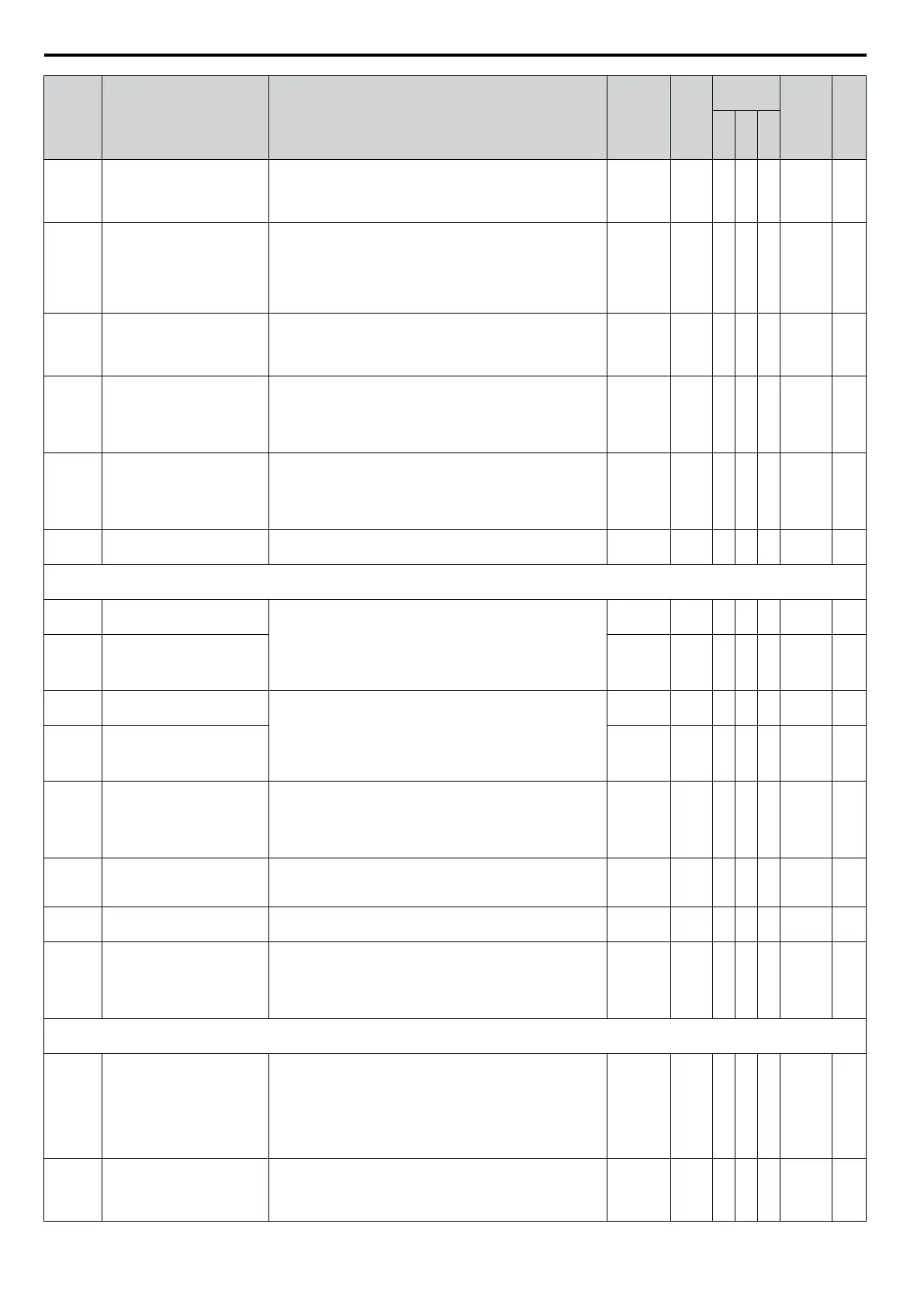
No. Name Description Range Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M
L3-20
Main Power Circuit Voltage
Adjustment Gain
Sets the proportional gain used by KEB, Stall Prevention and
overvoltage suppression.
If ov or Uv1 occurs at the beginning of KEB deceleration,
slowly increase this setting by 0.1.
0.00 to
5.00
1.00 A A A 465 215
L3-21
Accel/Decel Rate
Calculation Gain
Sets the proportional gain used to calculate the deceleration
rate during KEB, ov suppression function and Stall
Prevention during deceleration (L3-04 = 2).
This parameter does not typically require adjustment.
Increase the value in steps of 1.0 if overcurrent and
overvoltage occur.
0.00 to
200.00
1.00 A A A 466 215
L3-22
Deceleration Time at Stall
Prevention during
Acceleration
Sets the deceleration time used for Stall Prevention during
acceleration in Open Loop Vector Control for PM motors.
When set to 0, the drive decelerates at the normal
deceleration time.
0.0 to
6000.0
0.0 s − − A 4F9 212
L3-23
Automatic Reduction
Selection for Stall
Prevention during Run
0: Sets the Stall Prevention level throughout the entire
frequency range to the value in parameter L3-06.
1: Automatically lowers the Stall Prevention level in the
constant output range. The lower limit value is 40% of
L3-06.
0, 1 0 A A Α 4FD 214
L3-24
Motor Acceleration Time for
Inertia Calculations
Sets the time needed to accelerate the uncoupled motor at
rated torque from stop to the maximum frequency.
Setting the drive capacity to parameter o2-04 or changing
E2-11 will automatically set this parameter for a 4-pole
motor.
0.001 to
10.000
<4>
<10>
<11>
A A A 46E 216
L3-25 Load Inertia Ratio Sets the ratio between the motor and machine inertia.
0.0 to
1000.0
1.0 A A A 46F 216
L4: Frequency Detection
Use L4 parameters to configure frequency detection operation.
L4-01
Speed Agreement Detection
Level
These parameters configure the multi-function output (H2-
oo
= 2, 3, 4, 5) settings "Speed Agree 1", "User Set Speed
Agree 1", "Frequency Detection 1," and "Frequency
detection 2".
Parameter L4-01 sets the level while parameter L4-02 sets
the hysteresis for the Speed Detection Output Function.
0.0 to
400.0
0.0
Hz
A A A 499 216
L4-02
Speed Agreement Detection
Width
0.0 to
20.0
2.0
Hz
A A A 49A 216
L4-03
Speed Agreement Detection
Level (+/-)
These parameters configure the Multi-Function Output (H2-
oo = 13, 14, 15, 16) settings "Speed Agree 2", "User Set
Speed Agree 2", "Frequency Detection 3," or "Frequency
Detection 4".
Parameter L4-03 sets the level while parameter L4-04 sets
the hysteresis for the Speed Detection Output Function.
-400.0 to
+400.0
0.0
Hz
A A A 49B 216
L4-04
Speed Agreement Detection
Width (+/-)
0.0 to
20.0
2.0
Hz
A A A 49C 216
L4-05
Frequency Reference Loss
Detection Selection
Sets operation when the frequency reference is lost
(reference drops 90% or more within 400 ms).
0: Stop - Drive will stop.
1:
Run at L4-06 Level - Drive will
run at the percentage set
in L4-06 of the frequency reference before loss.
0, 1 0 A A A 49D 217
L4-06
Frequency Reference at
Reference Loss
Sets the frequency reference when a reference loss was
detected and L4-05 = 1. Reference will be: Fref = Fref at
time of loss x L4-06.
0.0 to
100.0
80.0
%
A A A 4C2 217
L4-07
Frequency Detection
Conditions
0: No detection during baseblock.
1: Detection always enabled.
0, 1 0 A A A 470 217
L4-08
<12>
Speed Agreement Detection
Conditions
0: Match speed with the soft-starter output
1: Match frequency reference and motor speed
Note:
In V/f Control, the drive ignores the value set to L4-08
and refers to the soft-starter output to determine whether a
speed agree situation has been reached.
0, 1 0 A A A 47F 217
L5: Fault Reset
Use L5 parameters to configure Automatic Restart after fault.
L5-01
Number of Auto Restart
Attempts
Sets the counter for the number of times the drive attempts
to restart when one of the following faults occurs: GF, LF,
oC, oH1, ov, PF, rH, rr, oL1, oL2, oL3, oL4, STo, Uv1.
Parameter L5-05 determines the how the restart counter is
incremented.
When the drive operates without fault for 10 minutes, the
counter will be reset.
0 to 10 0 A A A 49E 220
L5-02
Auto Restart Operation
Selection
Sets fault contact (H2-oo
= E) activation during automatic
restart attempts.
0: Fault output not active.
1: Fault output active during restart attempt.
0, 1 0 A
A A 49F 220
B.2 Parameter Table
360
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual

 Loading...
Loading...















