Description of the Software Modules and Parameters
Parameter manual b maXX BM5800
Document No.: 5.16029.03
719
of 814
3
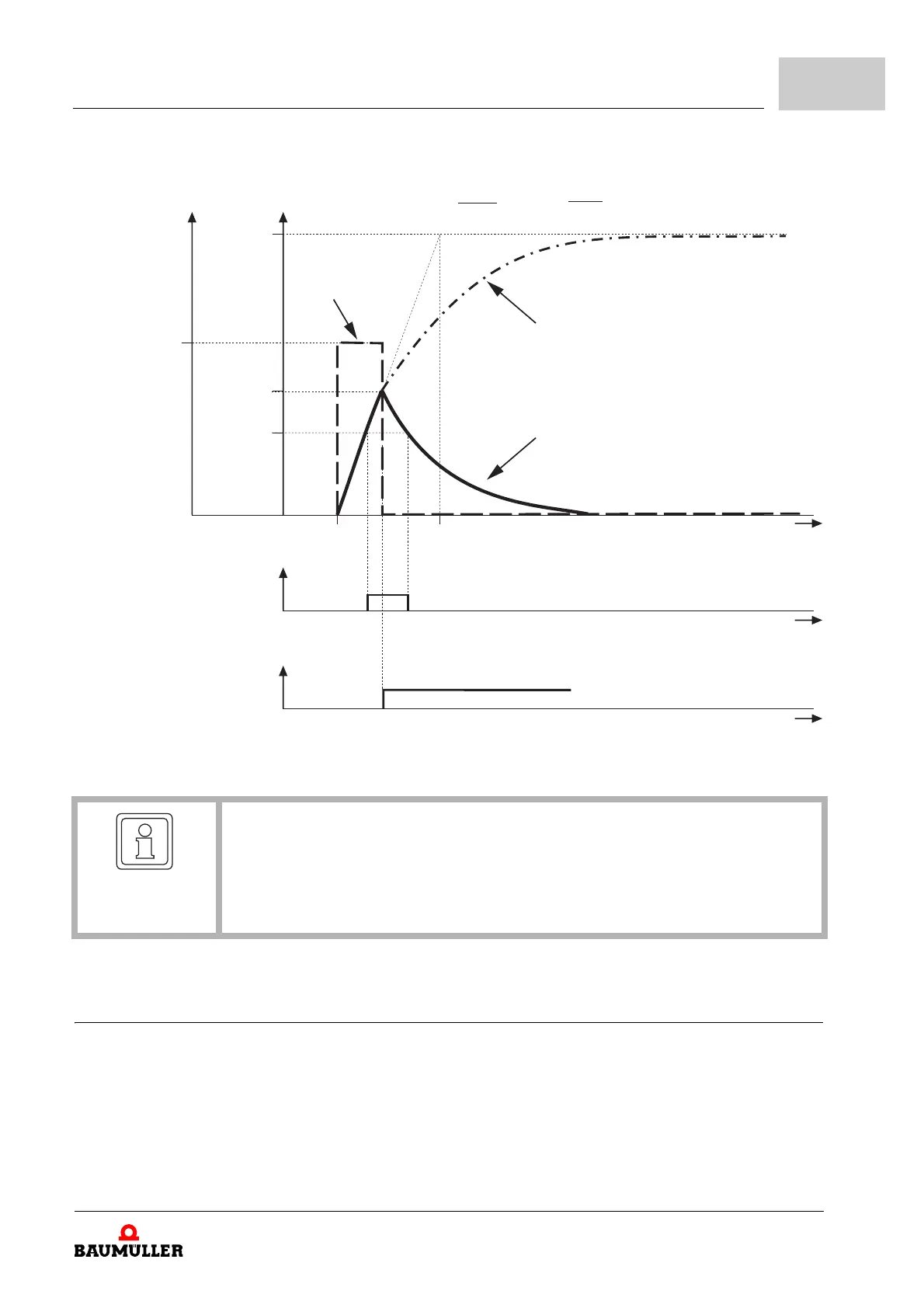
Figure 188: Function example of the motor l
2
t overload monitoring
3.11.5.2 Speed variable l
2
t overload monitoring
The standard solution referring to the constant maximum continuous current throughout
the total speed range is inadequate to many applications with synchronous and asynchro
-
nous machines. Therefore, in the following implementation solutions are introduced con-
sidering the speed-dependence of the maximum continuous current of the l
2
t motor
model.
As long as error is acknowledged in controlword 108.1
Motor error
error no. 99
Motor I2t time constant (107.28) = 600 s
Motor I2t actual value
6.28
Motor I2t actual value:
After error shut-down
from drive manager
Motor I2t actual value
(theoretically: w/o error shut-down)
Motor warning
Warnung no. 34
act
Limit
Motor total
smoothedcurrent
6.30
I
'
==
8A
5,1 A
**
((
))
2222
I* I I
I
I
2,46
N
'
''
act act
act
t
t
t
0
246 %
100 %
80 %
6.39
(8A)
5000_0357_rev03
100 %
6.30
NOTE!
If you have to consider UL 508 C:
If motor temperature is not monitored by a motor temperature sensor, motor overload
monitoring is to be activated. Among other things nominal current
Z107.9– and time
constant Z107.28– of the motor have to be specified correctly.