DVP-15MC Series Motion Controller Operation Manual
8-202
3
2
1
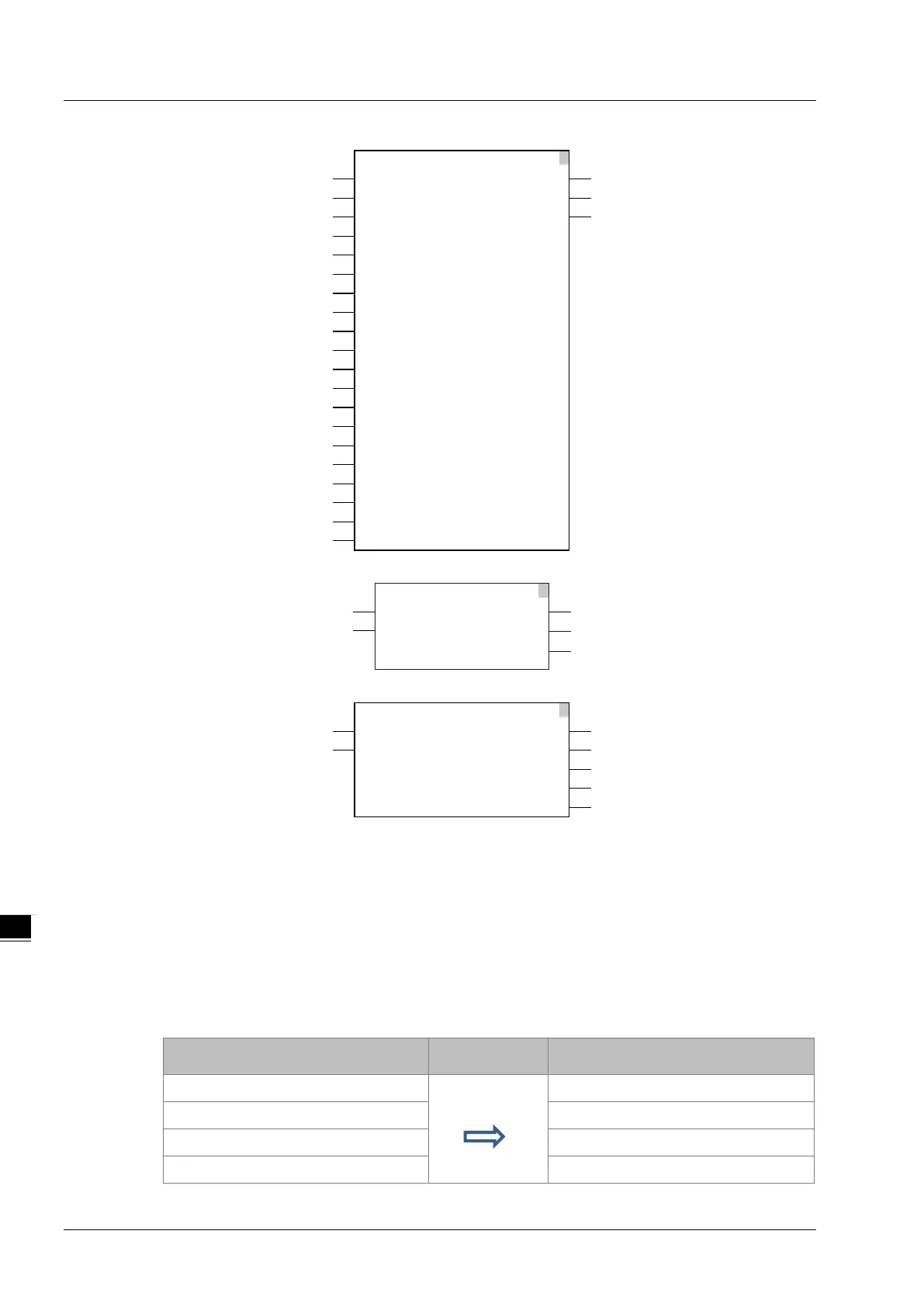
ETH_Link_Config
Execute
ETH_Link_Config0
LinkNum
Done
Error
ErrorIDEnableLink
SlaveNodeID
ObjType
En_FunCode17
Write_Buffer_Address
Write_Destination_Address
Write_Length
Read_Buffer_Address
Write_Buffer_Address_Offset
Read_Buffer_Address_Offset
Read_Destination_Address
Read_Length
Read_FunCode
Timeout
SlaveIP_segment1
SlaveIP_segment2
SlaveIP_segment3
SlaveIP_segment4
Config0_SIP1
Config0_Ex
Config0_En
1
Config0_SNodeID
Config0_SIP2
Config0_SIP4
Config0_SIP3
Config0_WBf_Off
Config0_OT
Config0_WBf_Add
Config0 En_FunCode17_
Config0_RBF_OFF
Config0_WDes_Add
Config0_RBF_ADD
Config0_WLTH
Config0_T
Config0_RDES_ADD
Config0_R_Code
Config0_RLTH
Config0_Done
Config0_ErrID
Config0_Err
ETH_Link_Manage
Enable Valid
ETH_Link_Manage0
Open LinkOpened
PhysicalLinkError
ETH_Link_Status
Enable
ETH_Link_Status0
LinkNum
Valid
ETH_Error
ETH_ErrorID
Error
ErrorID
MA_En
MA_Open
MA_Valid
MA_PhyErr
MA_LinkOpen
STA_En
1
STA_ErrID
STA_Err
STA_Valid
STA_ETH_ErrID
STA_ETH_Err
Operation steps and data exchange explanation
1. Combine Config0_WBf_Add and Config0_RBF_ADD with %MW0 and %MW100 respectively.
The initial values of Config0_WBf_Off and Config0_RBf_OFF are 10. Perform the online
function after the program compiling and downloading is successful.
2. Set Config0_Ex to TRUE. After ETH_Link_Config instruction execution is completed, set
MA_En to TRUE and then MA_Open to TRUE. After the output MA_LinkOpen of
ETH_Link_Manage instruction changes to TRUE, the motion controller starts to exchange data
with 12SE.
Via the ETH_Link_Status instruction, current communication status can be watched. The
corresponding relationships between the motion controller and DVP12SE are shown in the
following table.
%MW registers in the motion
controller
D registers in DVP12SE
%MW10
D0
%MW11 D1
%MW12 D2
……. ……

 Loading...
Loading...








