DVP-15MC Series Motion Controller Operation Manual
11-400
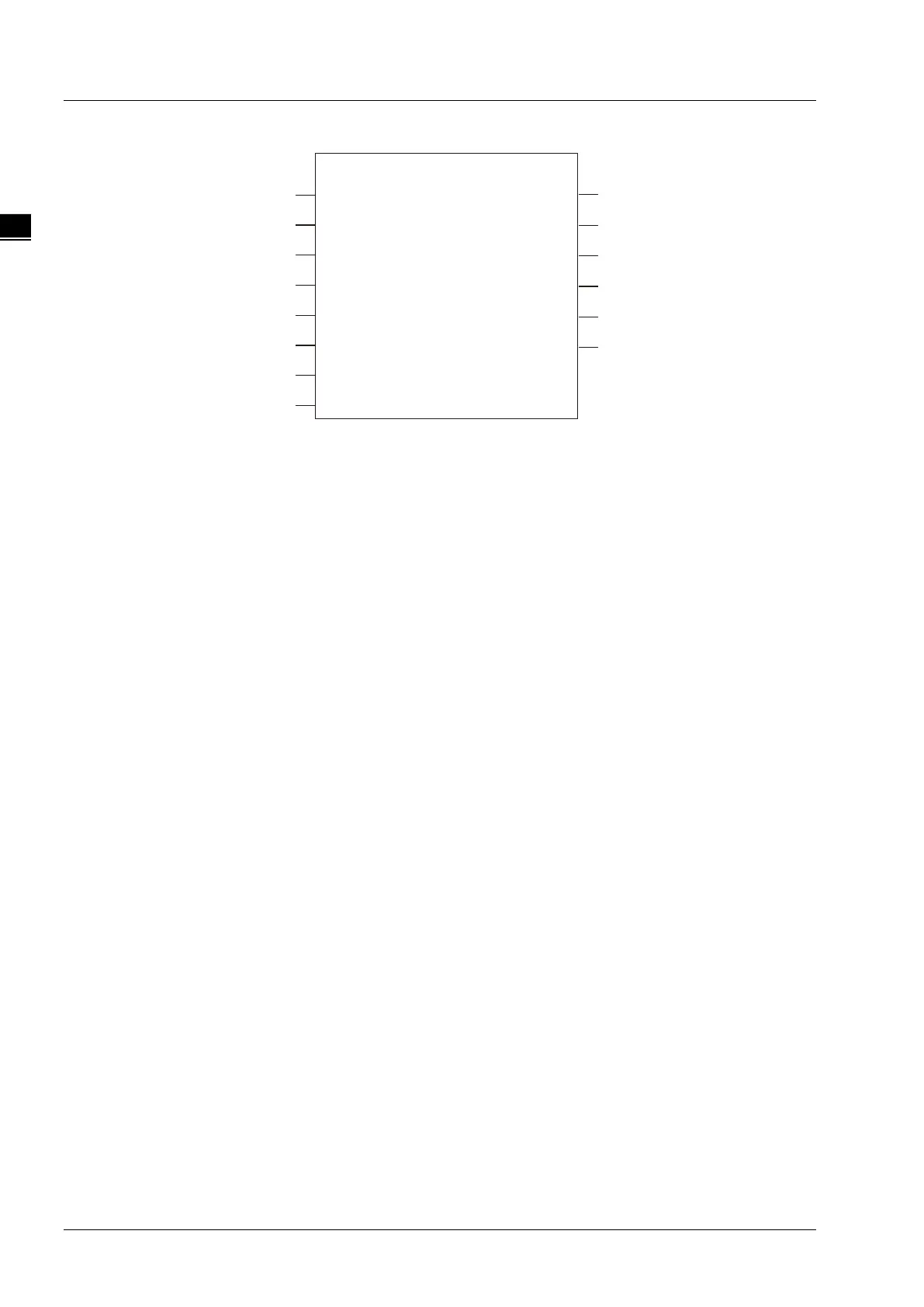
DMC_ControlAxisByPos
NC Px_
Axis 1
CAByPos_ErrID
CAByPos_Err
CAByPos_Abt
CAByPos_Act
CAByPos_Bsy
CAByPos_InC
ErrorID
Error
CommandAborted
Active
Busy
InControl
Deceleration
Acceleration
Velocity
Position
ContinousUpdate
Execute
Axis
CAByPos_Ex_Dec
CAByPos_Ex_Acc
CAByPos_Ex_Vel
Jerk
CAByPos_Ex
CAByPos_Ex_Jerk
CAByPos
CAByPos_Ex changes to TRUE after the axis is power on. Meanwhile CAByPos_Bsy is TRUE in the same
cycle. CAByPos_Act is TRUE in the next cycle. Then increase the value of CAByPos_Ex_Pos by 10 per
cycle. Suppose the SYNC cycle is 2ms, there are 500 SYNC cycles within 1 second and the axis command
velocity is 10*500=5000 units/second.

 Loading...
Loading...








