DVP-15MC Series Motion Controller Operation Manual
11-146
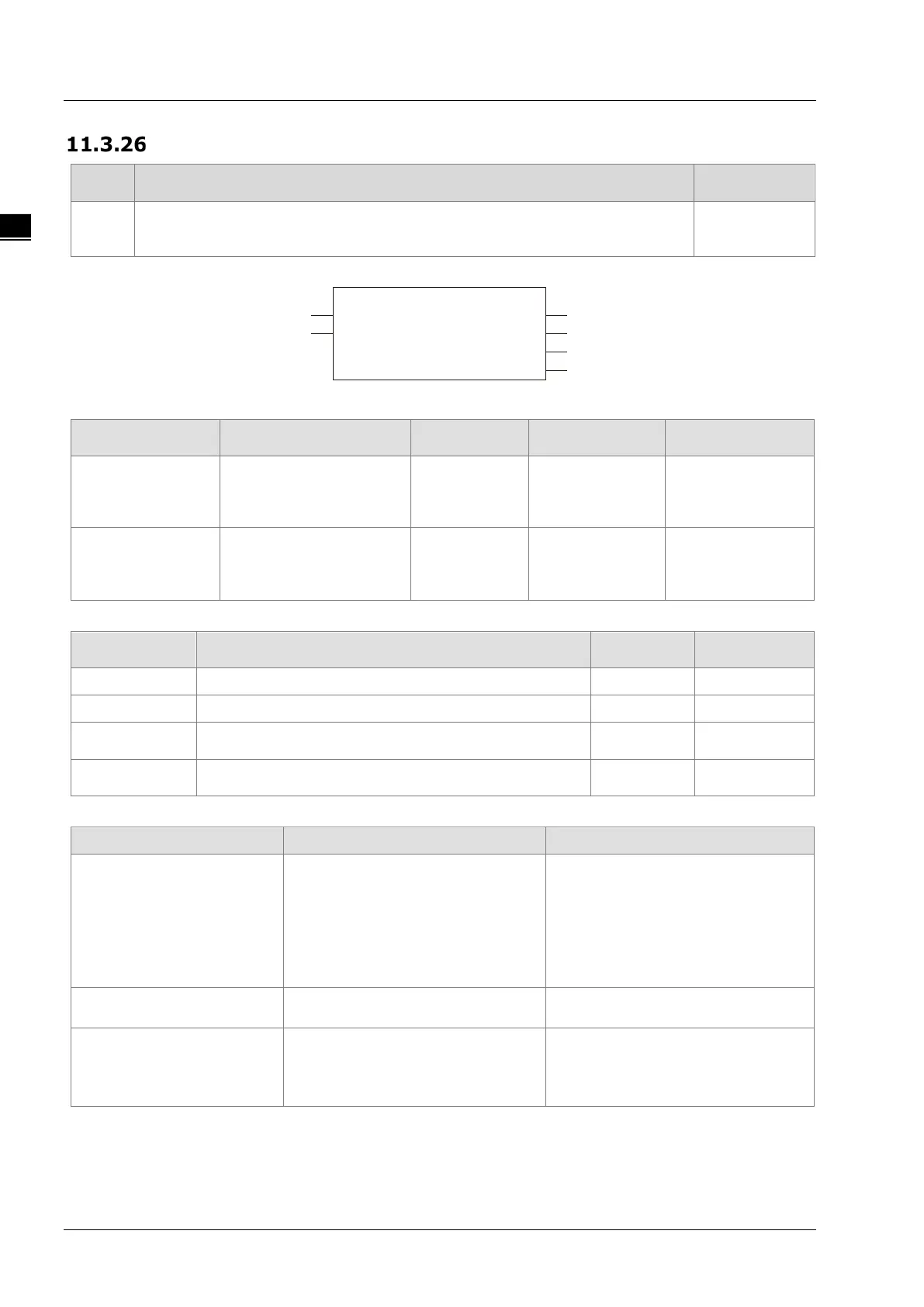
DMC_ReadPositionLagStatus
FB/FC Explanation
FB
DMC_ReadPositionLagStatus is used for the detection of the position lag.
DVP15MC11T-
DMC_ReadPositionLagStatus
Axis OutOfRange
DMC_ReadPositionLagStatus_instance
Enable Busy
Error
ErrorID
Input Parameters
Parameter name Function Data type
Validation timing
Axis
Specify the number of the
axis which is to be
controlled.
USINT
of Section 2.2.
(The variable
When Enable is
TRUE.
Enable
executed when Enable
changes from FALSE to
BOOL
TRUE or FALSE
(FALSE)
When Enable is
TRUE.
Output Parameters
Function Data type Valid range
OutOfRange TRUE when the position lag is out of the valid range. BOOL TRUE/FALSE
Busy TRUE when the instruction is being executed. BOOL TRUE / FALSE
Error
TRUE when there is an error in the execution of the
instruction.
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2.
WORD
Output Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
OutOfRange
When the absolute value of the
actual position difference of the
specified axis has been
exceeding the set Lag
within the HoldTime
it exceeded the Lag
value for the
first time.
The absolute value of the actual
position difference of the specified
axis is less than or equal to the Lag
value.
When Enable is FALSE.
When Error changes to TRUE.
Busy
When the instruction is being
executed.
When Error changes to TRUE.
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
When the problem is solved.
Function

 Loading...
Loading...








