Chapter 8 Logic Instructions
8-183
The index and subindex of the slave parameter to be read:
1. The user-defined parameter is a servo drive parameter to be read. The data length is
specified by users according to the data type of the read parameter. The data length of the
byte parameter is 1, the data length of the word parameter is 2 and the data length of the
double-word parameter is 4.
The method of calculating the index and subindex of a servo drive parameter:
Index= a servo drive parameter value (Hex) + 2000 (Hex)
Subindex= 0.
Example:
The index and subindex of the servo drive parameter P6-10 are [2000 + 060A(the hexdecimal
value of P6-10) ] 260A and 0 respectively.
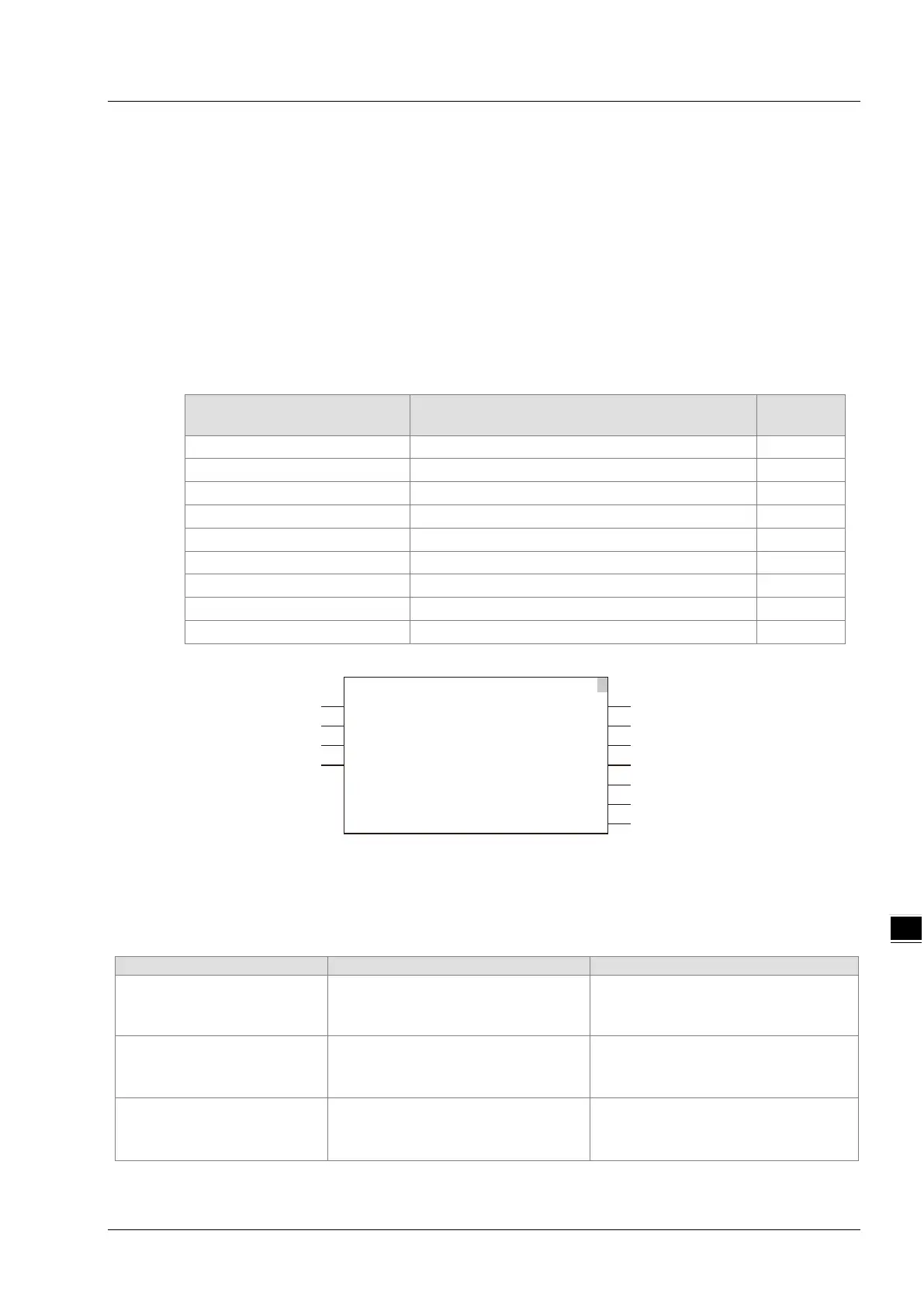
The variable table and program
Variable name Data type
ReadPm_C
DMC_ReadParameter_CANopen
ReadPm_C_Ex
BOOL
FALSE
ReadPm_C_Done
BOOL
2. For the index and subindex of other slave parameters, refer to CANopen-related manual of the
slave.
Output Update Timing
Timing for changing to TRUE
Timing for changing to FALSE
Done
When the reading of the
parameter content is completed.
When Execute changes from
TRUE to FALSE after the
instruction execution is completed.
Busy
When Execute changes to TRUE
Error
When Done changes from FALSE
to TRUE
Active
When the slave starts being
controlled by the instruction
When Error changes to TRUE
When Done changes from FALSE
to TRUE
1
ReadPm_C_Bsy
ReadPm_C_Act
ReadPm_C_Err
ReadPm_C_ErrID
ReadPm_C_DaTy
ReadPm_C_Done
ReadPm_C_Dat
0
16#2 60A
Axis1
ReadPm_C_Ex
DMC_ReadParameter_CANopen
Axis Done
ReadPm_C
Execute Busy
Active
Error
ErrorID
DataType
Data
Index
SubIndex
 Loading...
Loading...









