DVP-15MC Series Motion Controller Operation Manual
11-260
11.6.4.3 G0 (Rapid Positioning)
Function:
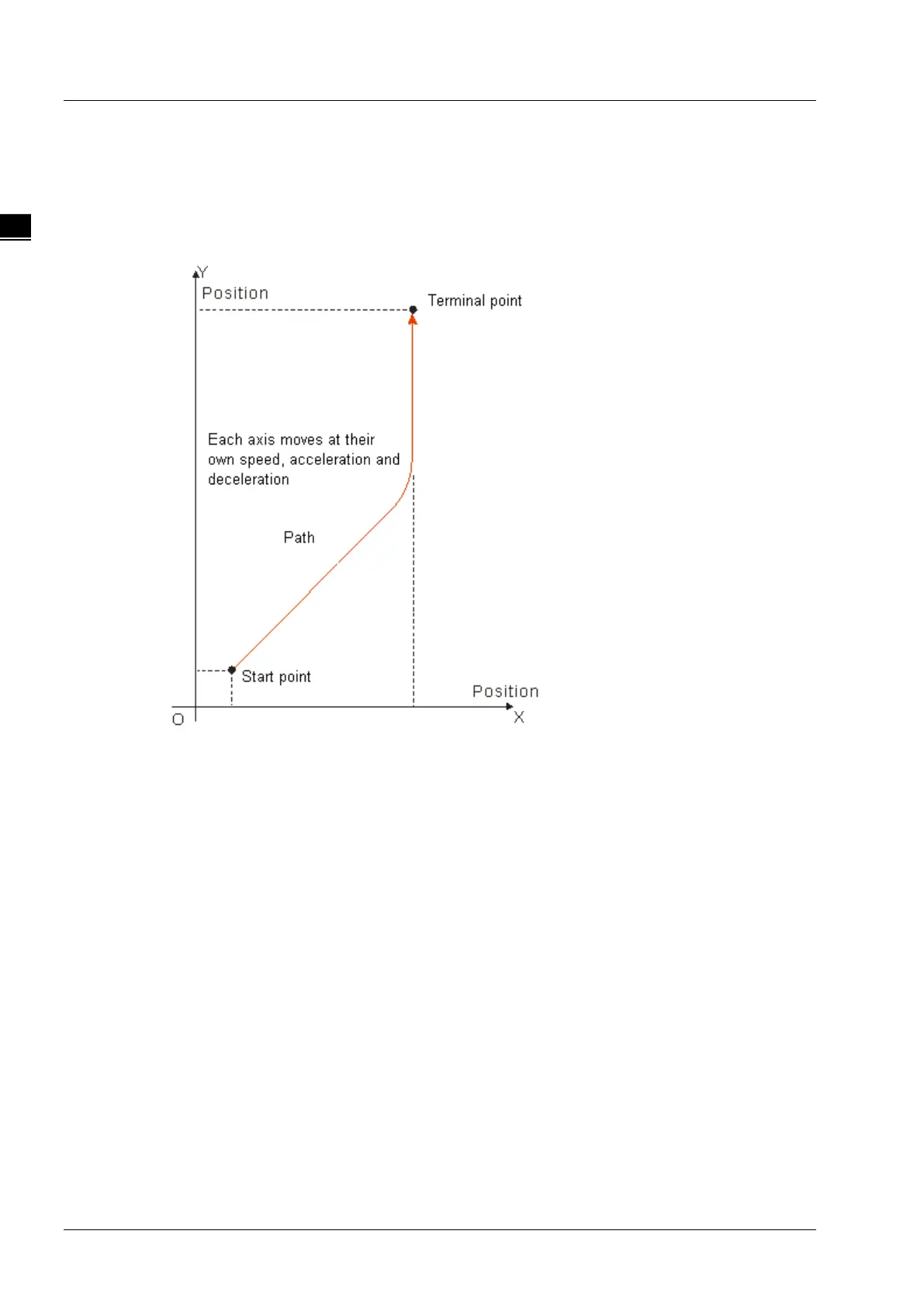
Each axis moves from current position to the terminal position at the given speed. Maximum 8 axes
can be controlled and each axis is independent with each other in motion.
And the motion path figure is displayed below.
Format: N_G0 X_Y_Z_A_B_C_P_Q_
Parameter explanation:
N_: The row number of G code in NC program.
X_: Specify the terminal position of axis X, Unit: unit, data type: LREAL.
Y_: Specify the terminal position of axis Y, Unit: unit, data type: LREAL.
Z_: Specify the terminal position of axis Z, Unit: unit, data type: LREAL.
A_: Specify the terminal position of axis A, Unit: unit, data type: LREAL.
B_: Specify the terminal position of axis B, Unit: unit, data type: LREAL.
C_: Specify the terminal position of axis C, Unit: unit, data type: LREAL.
P_: Specify the terminal position of axis P, Unit: unit, data type: LREAL.
Q_: Specify the terminal position of axis Q, Unit: unit, data type: LREAL.
Instruction explanation:
1. G0 can control one or more axes and other axis can be omitted.
2. The speed, acceleration, deceleration and jerk of each axis in motion depend on axis-related
parameters in axis group parameters. They can be set via DMC_SetG0Para instruction.
3. Absolute mode decided by G90: The terminal position of G0 is based on 0 unit.
4. Relative mode decided by G91: The terminal position of G0 is an incremental value beginning
 Loading...
Loading...









