Chapter 8 Logic Instructions
8-237
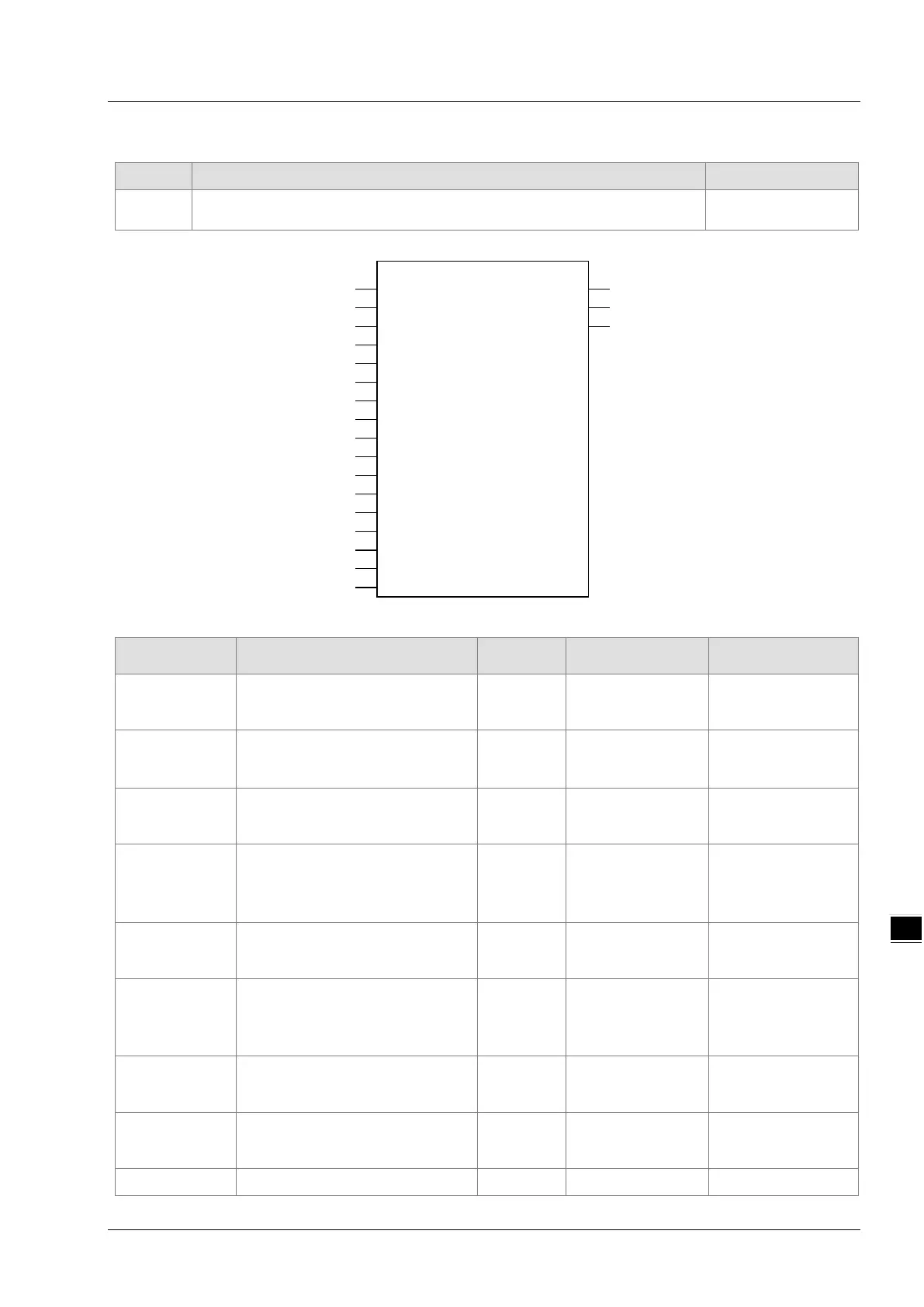
8.14.3.2 RS485_Link_Config
FB/FC
Explanation Applicable model
FB
RS485_Link_Config is used for configuration of 485 communication
parameters of the motion controller.
RS485_Link_Config
Execute
RS485_Link_Config_instance
LinkNum
Done
Error
ErrorID
EnableLink
Noncyclic
SlaveNodeID
ObjType
En_FunCode17
Write_Buffer_Address
Write_Destination_Address
Write_Length
Read_Buffer_Address
Write_Buffer_Address_Offset
Read_Buffer_Address_Offset
Read_Destination_Address
Read_Length
Read_FunCode
Timeout
Input Parameters
Function Data type
Validation timing
Execute
The instruction is executed when
Execute changes from FALSE to
TRUE.
BOOL
TRUE or FALSE
(FALSE)
LinkNum
Specify the number of the Link. UINT
(The variable value
changes from
FALSE to TRUE
EnableLink
Enable or disable the Link. BOOL
TRUE or FALSE
(FALSE)
changes from
Noncyclic
Set the Link communication
mode
FALSE: Cyclic,
BOOL
TRUE or FALSE
(FALSE)
When Execute
changes from
FALSE to TRUE
SlaveNodeID
Specify the node ID of the 485
slave.
USINT
0~255
(0)
changes from
ObjType
Set the type of the slave register
to be read and written
0: Word register
USINT
0~1
(0)
When Execute
changes from
FALSE to TRUE
En_FunCode17
Set the function code 17 to be
used or not.
BOOL
TRUE or FALSE
(FALSE)
changes from
FALSE to TRUE
Write_Buffer_A
ddress
The starting register of the master
where the sent data are stored
UINT
%MW32767
changes from
Write_Buffer_A Set the offset of the starting
USINT 0~255
When Execute
 Loading...
Loading...









