DVP-15MC Series Motion Controller Operation Manual
8-312
PID-related Instructions
FB
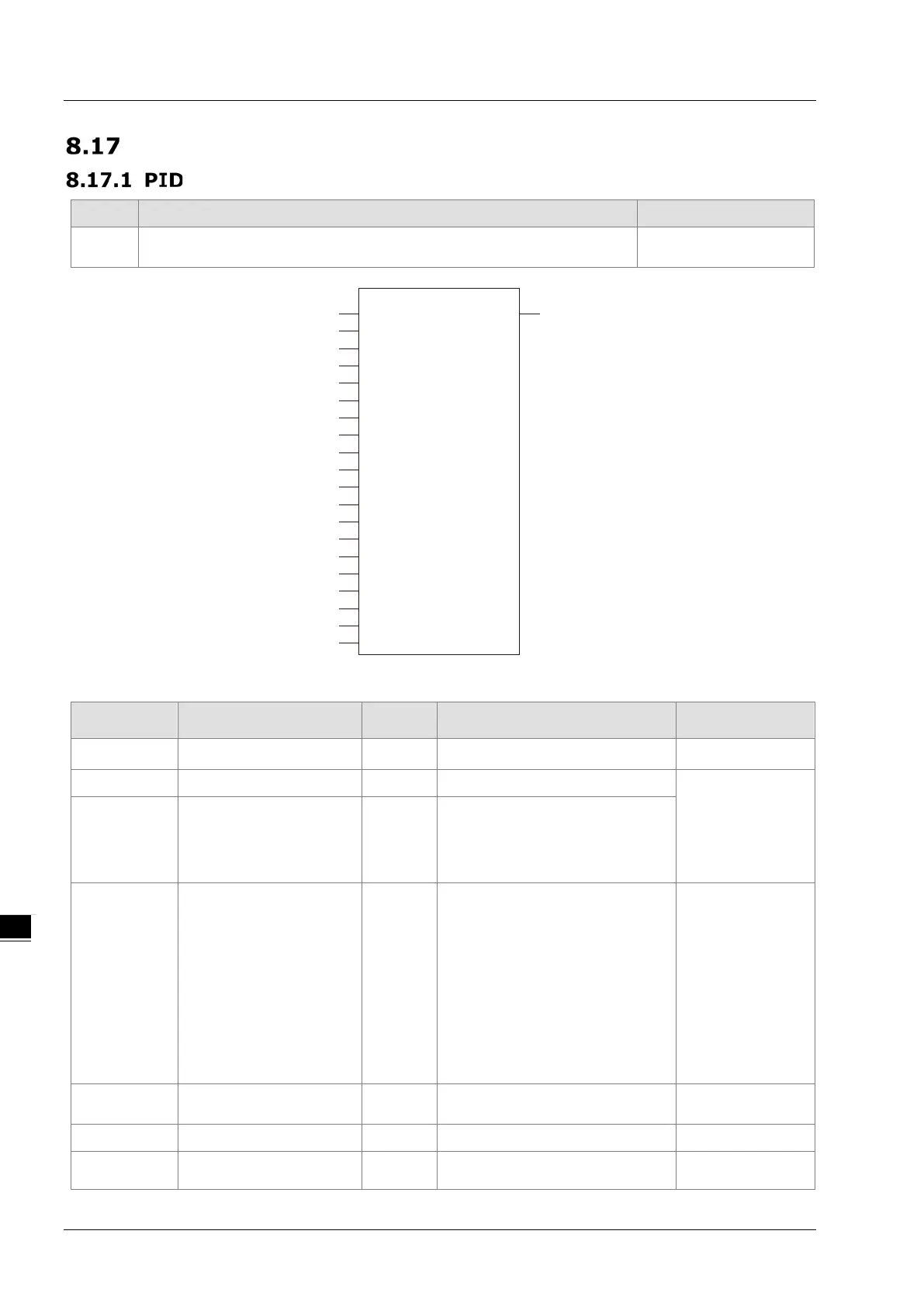
The PID instruction is applicable for the PID operation.
DVP15MC11T-06
PID
MV
PID_instance
PID_RUN
SV
PV
PID_MODE
PID_MAN
MOUT_AUTO
CYCLE
Kc_Kp
Ti_Ki
Td_Kd
Tf
PID_EQ
PID_DE
PID_DIR
ERR_DBW
MV_MAX
MV_MIN
MOUT
BIAS
I_MV
Parameters
Meaning
Description Valid range
PID_RUN
Enable PID operation Input Enable PID operation TRUE or FALSE
SV
Target value Input Target value
−1.175495e-38,
0,
+1.175495e-
PV
Current value Input Current value
PID_MODE
PID control mode Input
0: Auto control, the output value
(MV) is involved in the automatic
operation.
1: Auto parameter-tuning
function; when the tuning of the
parameters is completed, the
auto control mode is entered
automatically (PID_MODE is set
to 0) and appropriate parameters
Kc_Kp, Ti_Ki, Td_Kd and Tf are
0, 1
PID_MAN
PID A/M mode Input
TRUE: Manual mode
FALSE: Auto mode
TRUE or FALSE
MOUT_AUTO
Reserved Input - -
CYCLE Sampling time(T
S
) Input Sampling time(T
S
)
(Unit: ms)

 Loading...
Loading...








