DVP-15MC Series Motion Controller Operation Manual
10-32
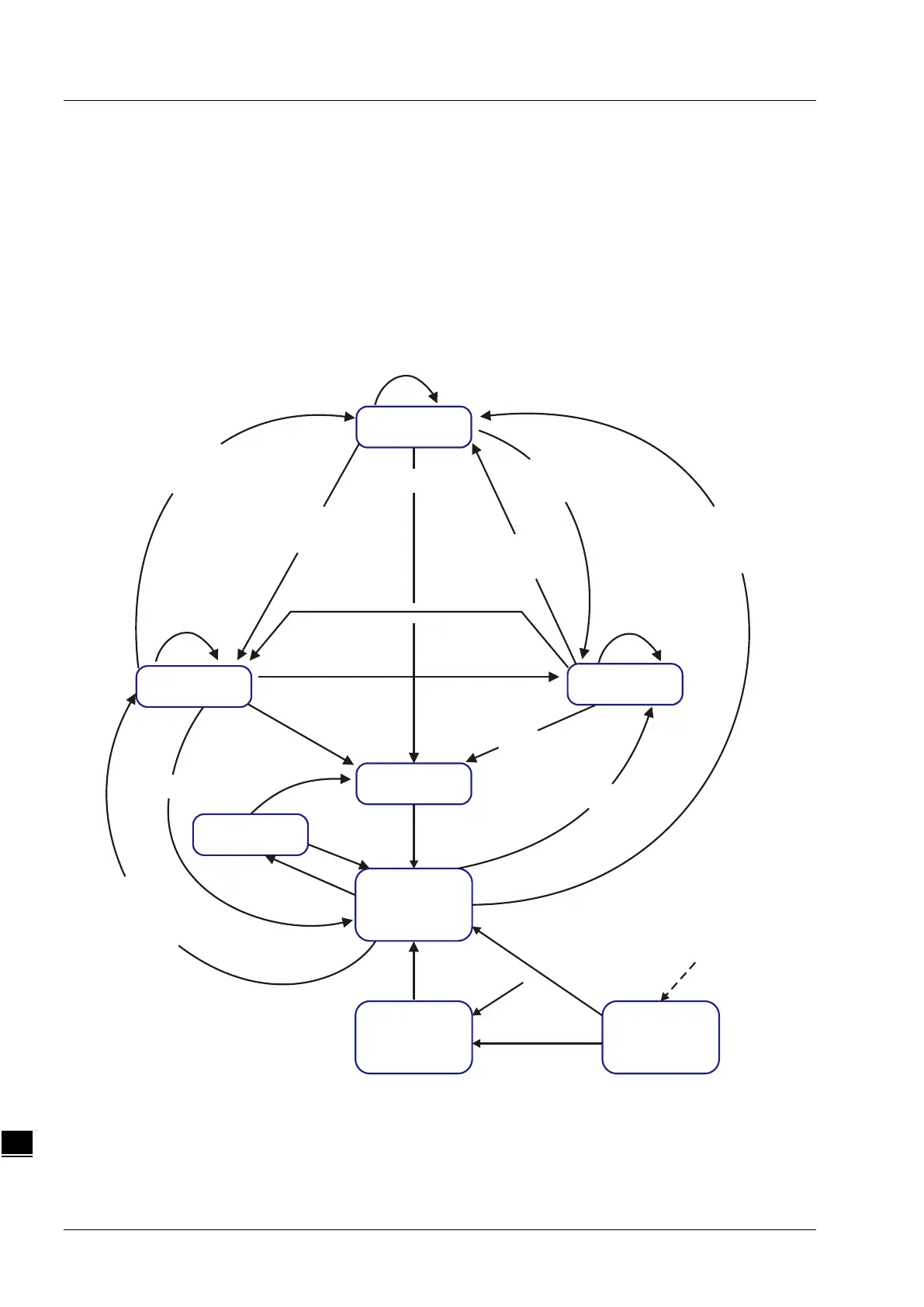
10.4 The State Machine
When DVP-15MC series motion controller utilizes the motion control instruction to control every axis, there is
one internal-run state for every axis and axis states are switched by following the state machine instructions
below. The state machine defines the motion instructions that can be executed in all states and the states after
the motion instructions are executed. Using the motion instructions, users could judge if a certain instruction
could be used in current state through the state machine.
The state machine of DVP-15MC series motion controller is illustrated as below and the arrow points to the
axis status.
Disable
StandStill
Homing
D
o
n
e
Note6
Note1
ErrorStop
Stopping
Discrete M otion
Continuous
Motion
Synchronized
Motion
D
o
n
e
M
C
_
H
o
m
e
MC_S to p
MC_Stop
M
C
_
S
t
o
p
MC_MoveVelo ci ty
MC_MoveAb so lute
MC_ MoveRela tive
MC_Mo veA dditive
MC_M ove Superim posed
MC_M oveVelocity
MC_M oveVelocity
MC_Mo veS uperimpo se d
MC_Mo ve Vel ocity
MC_MoveAb so lute
MC_M oveRelative
MC_Mo veA dditive
MC_S to p
MC_Gea rOut
MC_ Cam Out
N
o
t
e
4
Note3
Note5
N
o
t
e
2
MC_Ge arIn(S lave)
MC_Cam In(Slave)
MC_C omb ineAxes(Slave)
MC_Mo veA bso lute
MC_Mo veRelative
MC_Mo veA dditive
MC_Mo veS uperimpo se d
MC_Ha lt
MC_Ha ltSuperim posed
MC_ GearIn( Slave)
MC_ Cam In(Slave)
MC_ MoveSu peri mposed (Slave)
MC_ Com bin eAxes(Slave)
MC_Gear In(Sla ve )
MC_C am In(Slave )
MC_C ombineAxes(Slave)
MC_Gear In (Sla ve )
MC_C amIn(Slave)
MC_C om bineA xes(S lave)
MC_M oveAbsolu te
MC_Mo ve Relative
MC_ Hal t
MC_H alt
Note1:The axis in any state will enter the ErrorStop state as long as an error occurs in the axis.
Note2:The axis enters the Disabled state when no axis error occurs in any state and Enable of
MC_Power is FALSE.

 Loading...
Loading...








