DVP-15MC Series Motion Controller Operation Manual
11-288
G Code Instruction
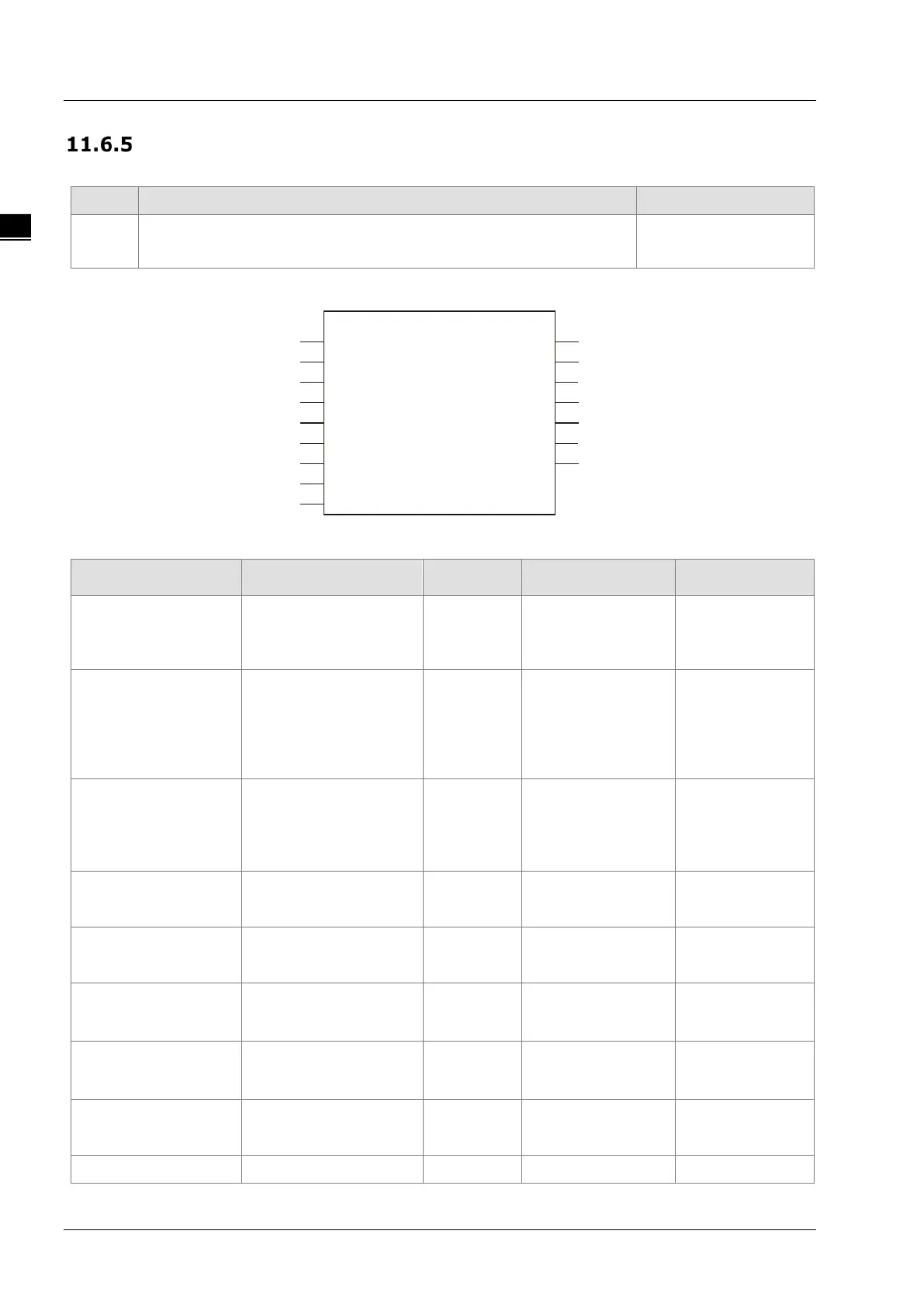
11.6.5.1 DMC_CartesianCoordinate
FB/FC Explanation Applicable model
FB
DMC_CartesianCoordinate is used for controlling the Cartesian-
coordinate robotic arm to make the interpolation in accordance with G
DVP15MC11T
DVP15MC11T-06
DMC_CartesianCoordinate
Execute Done
DMC_CartesianCoordinate_instance
Pause
Stop
Busy
Active
CommandAborted
VelOverride
Depth
NCFile
AxesGroup
Mode
Res
Error
ErrorID
CurrentLine
Input Parameters
Parameter name Function Data type
Validation timing
Execute
executed when Execute
changes from FALSE to
BOOL
TRUE or FALSE
(FALSE)
-
Pause
from FALSE to TRUE,
the Cartesian-coordinate
robotic arm stops
executing G code
BOOL
TRUE or FALSE
(FALSE)
Stop
from FALSE to TRUE,
the Cartesian-coordinate
robotic arm terminates
BOOL
TRUE or FALSE
(FALSE)
VelOverride
Velocity override
(%)
LREAL
0~500
(0)
changes from
FALSE to TRUE.
Depth
Fill 1 for internal
reservation
UINT 1
changes from
FALSE to TRUE.
NCFile
The number of the NC
file
UINT
(The variable value
changes from
FALSE to TRUE.
AxesGroup
The number of the axes
group
USINT
(The variable value
must be set)
changes from
FALSE to TRUE.
Mode
Fill 0 for internal
reservation
INT 0
changes from
FALSE to TRUE.
Res Reserved

 Loading...
Loading...








