Chapter 7 Introduction of Axis Parameters
7-7
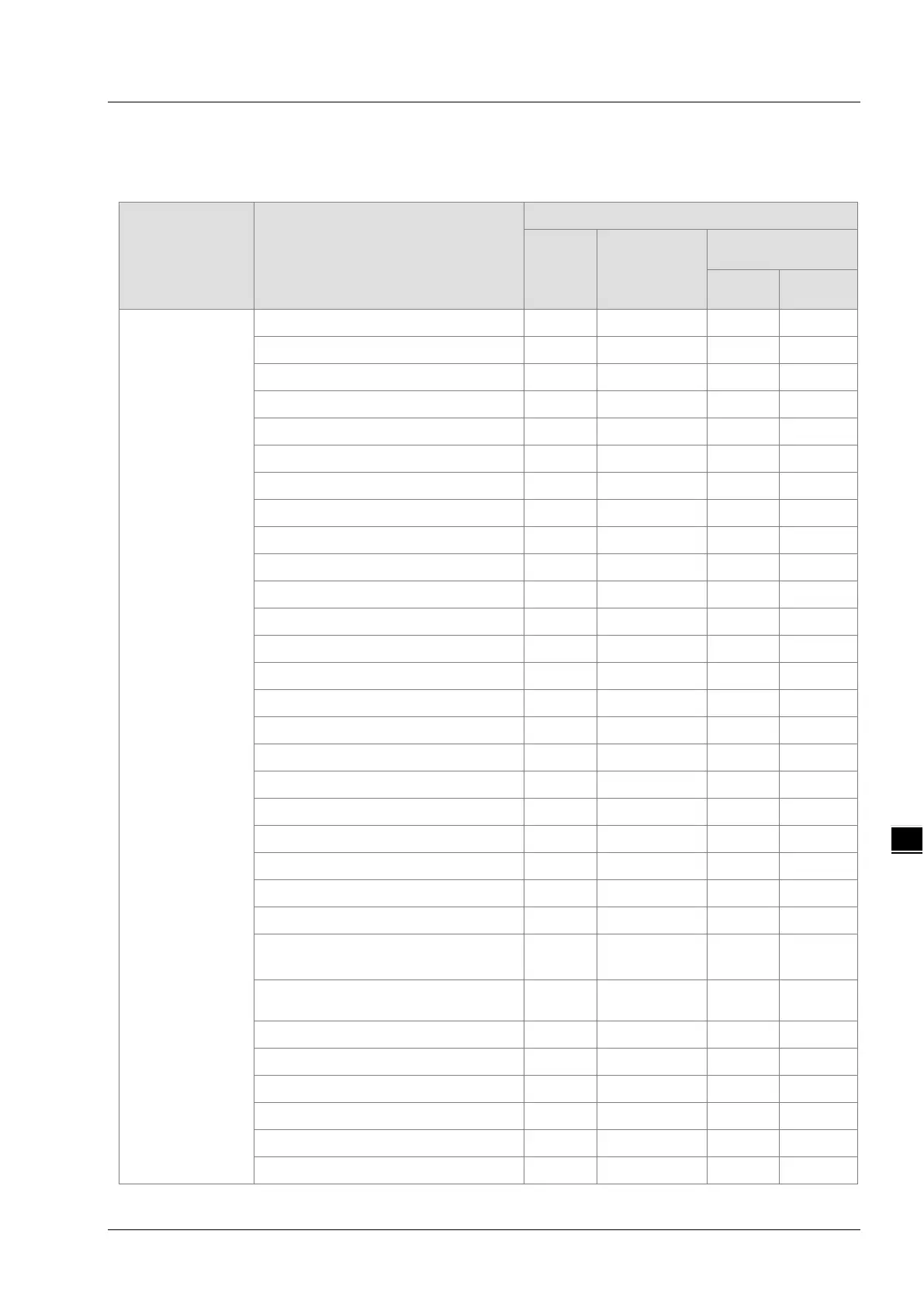
7.1.4 Motion and Communication Instructions for Each Task Type
Here is the table of motion instructions for different task types. “V” means the motion instruction can be
executed for the task type and “–” means the motion instruction can not be executed for the task type.
Classification Instruction name
Task type
Cyclic
task
Freewheeling
task
task
task
task
Single-axis
instructions
MC_Power
- - V -
MC_Home
- -
V -
MC_MoveVelocity
- -
V -
MC_Halt
- -
V -
MC_Stop
- -
V -
MC_MoveRelative
- -
V -
MC_MoveAdditive
- -
V -
MC_MoveAbsolute - -
V -
MC_MoveSuperimposed
- -
V -
MC_Haltsuperimposed
- -
V -
MC_SetPosition
- -
V -
MC_SetOverride
- -
V -
MC_Reset
- -
V -
DMC_SetTorque
- -
V -
MC_ReadAxisError V V V V
MC_ReadActualPosition V V V V
MC_ReadStatus V V V V
MC_ReadMotionState V V V V
DMC_ReadParameter_Motion V V V V
DMC_WriteParameter_Motion V V V V
DMC_TouchProbe - - V -
DMC_ChangeMechanismGearRatio - - V -
DMC_Jog - - V -
DMC_MoveVelocity - - V -
DMC_MoveVelocityStopByPos - - V -
DMC_MoveVelocityStopByLinePos - - V -
DMC_ReadPositionLagStatus V V V V
DMC_SwitchSoftLimit V V V V
DMC_TorqueControl - - V -
DMC_TouchProbeCyclically - - V -
DMC_WritePositionLagSetting V V V V

 Loading...
Loading...








