Chapter 8 Logic Instructions
8-327
Network Diagnosis
8.19.1.1 CANmotion_SysDiag
FB/FC
Explanation Applicable model
FB
CANmotion_SysDiag is used for the diagnosis of states of all slaves
connected to Motion port.
DVP15MC11T
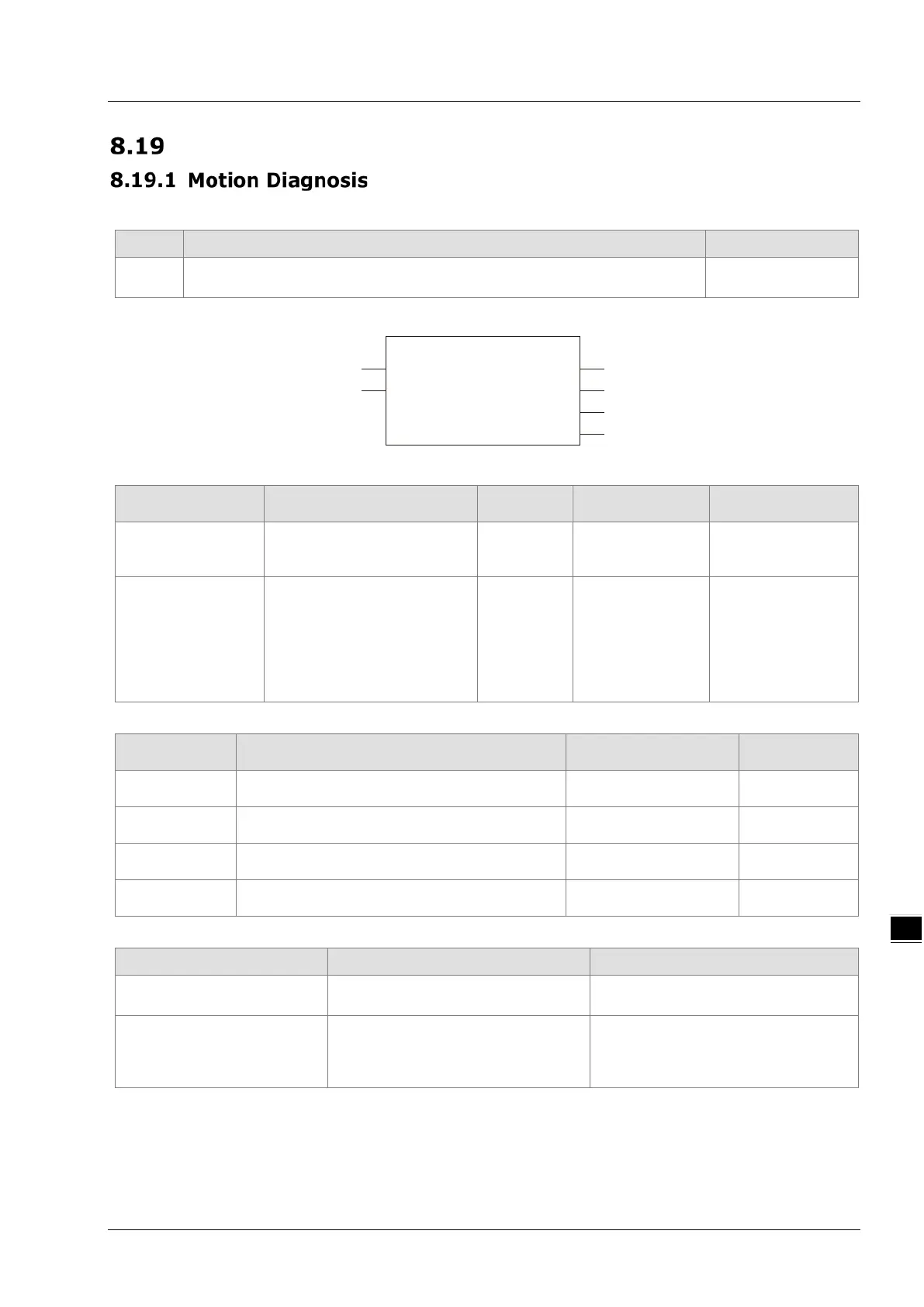
CANmotion_SysDiag
Enable Done
CANmotion_SysDiag_instance
DiagType Error
ErrorID
Node
Input Parameters
Parameter name Function Data type
Validation timing
Enable
The instruction is executed
when Enable changes from
BOOL
TRUE or FALSE
(FALSE)
When Enable
changes to TRUE.
DiagType
configured in the software.
2: Whether axes make
connection with Motion port
3: Whether axes have
released Emergency
USINT 1, 2, 3
When Enable
changes to TRUE.
Output Parameters
Function Data type Valid range
Done
TRUE when the instruction execution is
completed.
BOOL TRUE/FALSE
Error
TRUE when there is an error in the execution
of the instruction.
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs.
Please refer to section 12.2.
WORD
Node
Outputs corresponding states of all axes
based on different values of DiagType.
Array[1..32]of BOOL
Output Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done
When the instruction execution is
completed.
When Error changes to TRUE.
When Enable changes to FALSE.
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
When the error is cleared.
Functions
CANmotion_SysDiag is used for the diagnosis of states of all slaves connected to Motion port. The
instruction can only be applied to the Motion port built in the motion controller.
The output Node is an array of BOOL type for outputing the states of 1~32 axes. The value of Node has

 Loading...
Loading...








