DVP-15MC Series Motion Controller Operation Manual
12-8
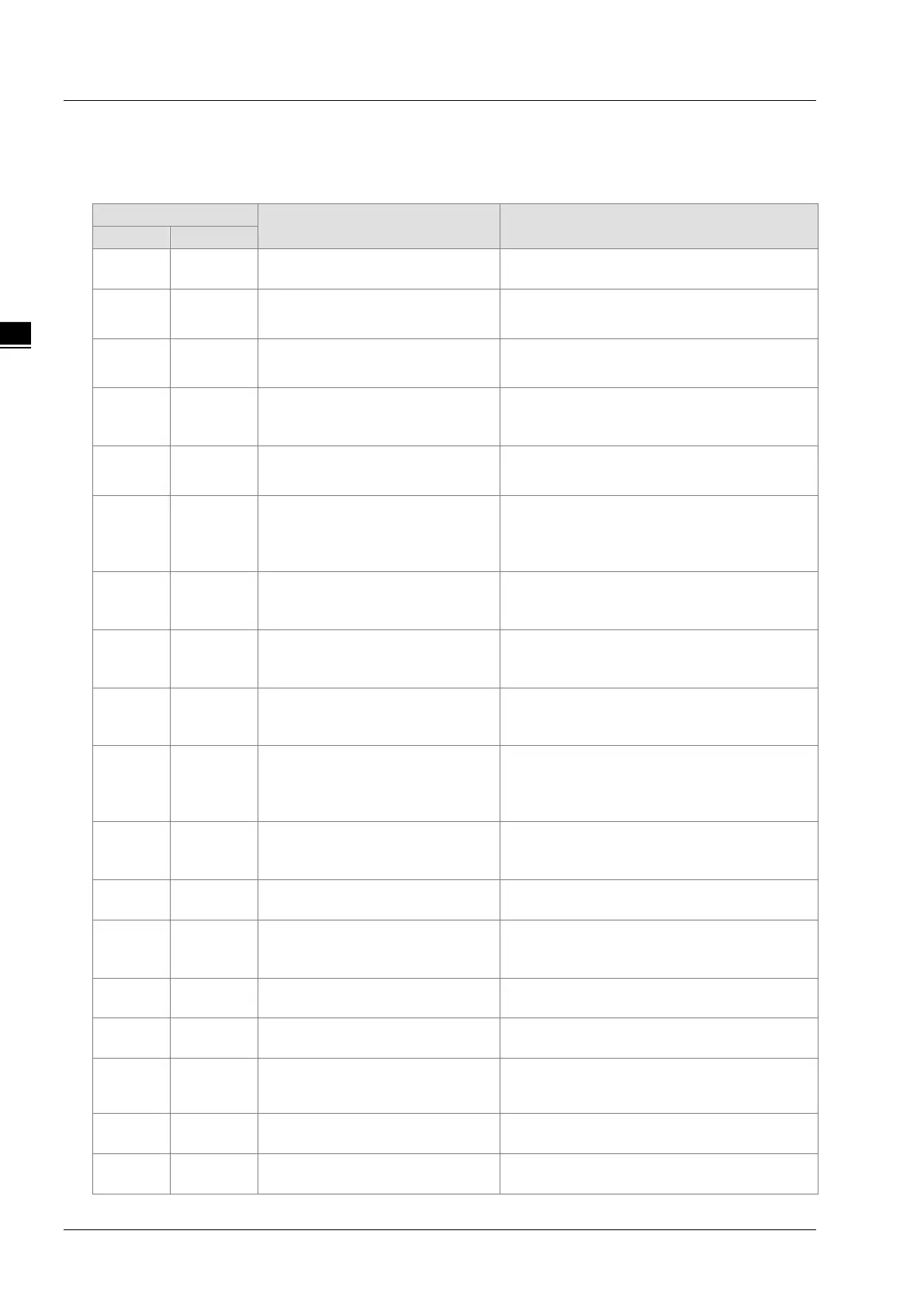
12.2 Table of Error IDs in Motion Instructions
When an error occurs in the motion instruction, the value of ErrorID can be seen as follows for analysis of
the cause and troubleshooting.
Meaning How to deal with
1001 4097
The axis No. exceeds the valid
range.
Make sure that the value of the input
variable, Axis is within the allowed range.
1002 4098
The acceleration exceeds the
valid range.
Make sure that the value of the input
variable, Acceleration is a positive number.
1003 4099
The deceleration exceeds the
valid range.
Make sure that the value of the input
variable, Deceleration is a positive number.
1004 4100
acceleration exceeds the valid
range.
Make sure that the value of the input
variable, Jerk is a positive number.
1005 4101
The velocity exceeds the valid
range.
Make sure that the value of the input
variable, Velocity is a nonzero value.
1006 4102
The position value exceeds the
valid range.
Make sure that the value of the input
variable, Position of MC_MoveAbsolute is
not greater than the value of Modulo among
1007 4103
The direction value exceeds the
valid range.
Modify the value of the input variable,
Direction into that which can be set in the
1008 4104
The buffermode value exceeds
the valid range.
Modify the value of the input variable,
BufferMode into that which can be set in the
1009 4105
The input value for reference
position type is wrong.
Modify the value of the input variable,
ReferenceType into that which can be set in
the instruction.
100A 4106
The timing for executing
MC_SetPosition is improper.
Change the timing of executing
MC_SetPosition. Do not execute
MC_SetPosition while MC_Home or
MC_Stop is being executed.
100B 4107
The number of e-cam table is
incorrect.
Modify the value of the input variable,
CamTable into that of CamId set in the
100C 4108
The axis No. of the master axis is
Make sure that the value of the input
variable, Axis is within the allowed range.
100D 4109
The input value of the
engagement mode is wrong.
Modify the value of the input variable,
StartMode into that which can be set in the
100E 4110
The value of the master scaling is
incorrect.
Make sure that the value of the input
variable, MasterScaling is a positive number.
100F 4111
The value of the slave scaling is
incorrect.
Make sure that the value of the input
variable, SlaveScaling is a nonzero value.
1010 4112
The chosen position
master axis is wrong.
Modify the value of the input variable,
MasterValueSource into that which can be
1011 4113
Conflict in the axis No. of the
master and slave axes.
Modify the values of the input variables,
Master and Slave into different values.
1012 4114 Wrong e-gear numerator value
Modify the value of the input variable,
Numerator into a nonzero value.
 Loading...
Loading...









