Chapter 11 Motion Control Instructions
11-139
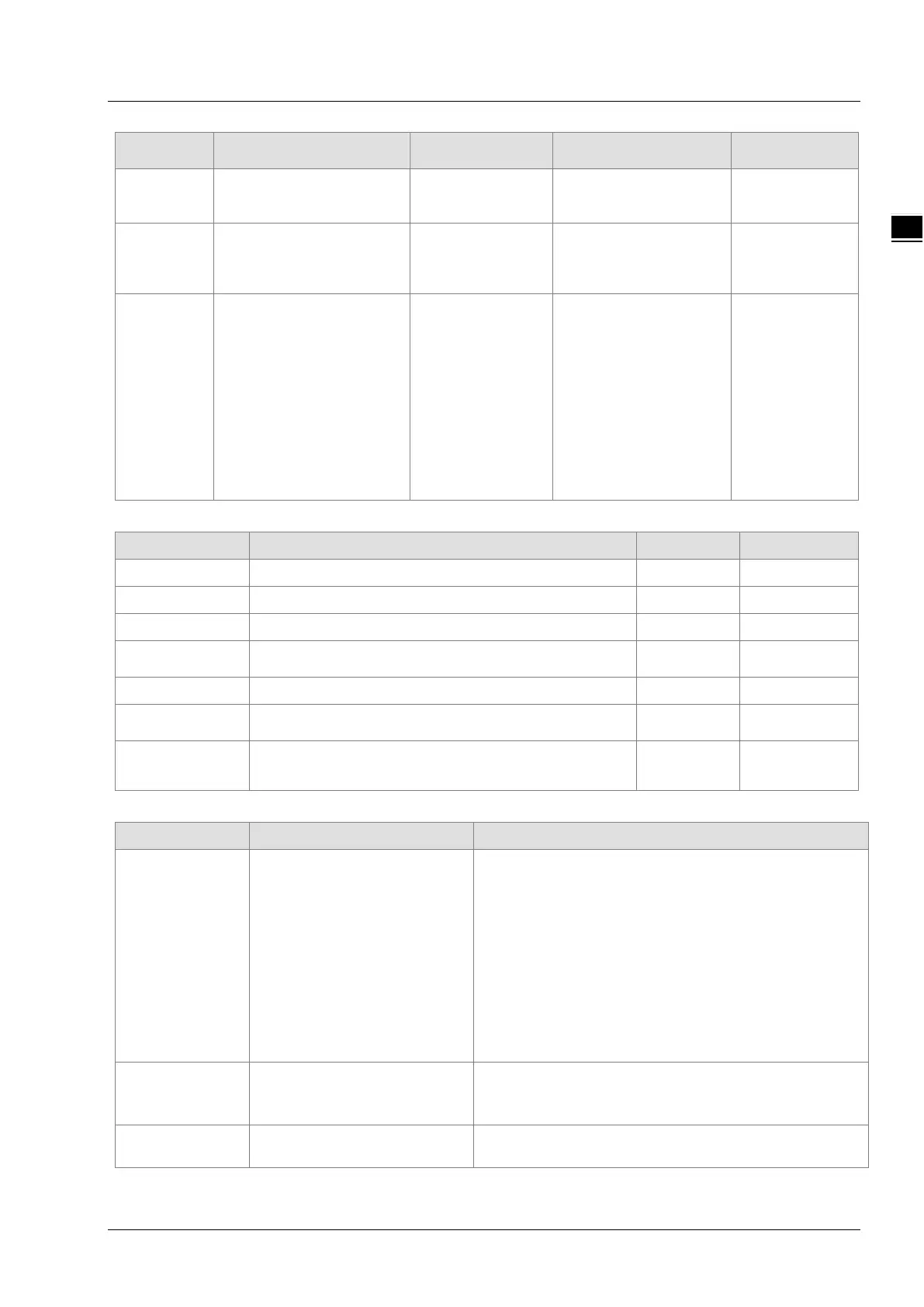
Function Data type
(UnitsPerRotation)
must be set)
TRUE.
StopPhase
Specify a phase in the
modulo.
LREAL
0~the setting value of
RoundPhase
(0)
TRUE.
BufferMode
Specify the behavior when
executing two instructions.
0: Aborting
1: Buffered
2: BlendingLow
3: BlendingPrevious
4: BlendingNext
5: BlendingHigh
MC_Buffer_Mode
0:mcAborting
1:mcBuffered
2:mcBlendingLow
3:mcBlending
_Previous
4:mcBlending _Next
5:mcBlending _High
(0)
When Ex_Move
changes to
TRUE.
Output Parameters
Parameter name Function Data type Valid range
Invelocity TRUE when the target velocity is reached. BOOL TRUE / FALSE
Stop_Done TRUE when the stop position is reached. BOOL TRUE / FALSE
Busy TRUE when the instruction is being executed. BOOL TRUE / FALSE
Active
TRUE when the axis is being controlled by the
instruction.
BOOL TRUE / FALSE
CommandAborted
TRUE when the instruction is aborted. BOOL TRUE / FALSE
Error
TRUE when there is an error in the execution of the
instruction.
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2.
WORD
Output Update Timing
Name Timing for changing to TRUE
Timing for changing to FALSE
Invelocity
When the target velocity is
reached.
When CommandAborted changes to TRUE.
When Error changes to TRUE.
Invelocity changes to FALSE immediately when
Ex_Move changes from FALSE to TRUE again if the
input parameter values are revised after the target
velocity is reached. If the input parameter values are
not changed after the instruction execution is
completed, Invelocity changes to FALSE
immediately when Ex_Move changes from FALSE to
TRUE again. Invelocity will change to TRUE in the
Stop_Done
When the stop position is
reached
When CommandAborted changes to TRUE.
When Error changes to TRUE.
When Ex_Stop changes to FALSE.
Busy
When Ex_Move changes to
TRUE.
CommandAborted
When Error changes to TRUE.

 Loading...
Loading...








